–Ш–љ—В–µ—А–µ—Б–љ–Њ–µ –њ—А–µ–і–ї–Њ–ґ–µ–љ–Є–µ
–Т—Е–Њ–і
–°—В–∞—В–Є—Б—В–Є–Ї–∞


| –°–∞–Љ–Њ–і–µ–ї—М–љ—Л–є —Б—В–∞–љ–Њ–Ї —Б –І–Я–£ –љ–∞ Arduino |
| –Ю–±–Ј–Њ—А—Л |
–Ъ–∞–Ї –њ–Њ—Б—В—А–Њ–Є—В—М 3-–Њ—Б–µ–≤–Њ–є —Б—В–∞–љ–Њ–Ї —Б –І–Я–£ –≤ –і–Њ–Љ–∞—И–љ–Є—Е —Г—Б–ї–Њ–≤–Є—П—Е –Є–Ј –њ–Њ–і—А—Г—З–љ—Л—Е –Љ–∞—В–µ—А–Є–∞–ї–Њ–≤
–Я—А–µ–і–ї–∞–≥–∞–µ–Љ –њ–Њ—Б–Љ–Њ—В—А–µ—В—М –љ–∞ –њ–Њ—И–∞–≥–Њ–≤–Њ–µ –Є–Ј–≥–Њ—В–Њ–≤–ї–µ–љ–Є–µ —Б–∞–Љ–Њ–і–µ–ї—М–љ–Њ–≥–Њ –І–Я–£ —Б—В–∞–љ–Ї–∞ –Є–Ј –њ–Њ–і—А—Г—З–љ—Л—Е –Љ–∞—В–µ—А–Є–∞–ї–Њ–≤. –Т –Њ—Б–љ–Њ–≤–µ —А–∞–Љ—Л –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ—Л —Б—В–∞—А—Л–µ —П—Й–Є–Ї–Є –Њ—В –±—Г—В—Л–ї–Њ–Ї, –љ–Њ –≤—Л, –Љ–Њ–ґ–µ—В–µ –њ–Њ–≤—В–Њ—А–Є—В—М –Є–Ј–≥–Њ—В–Њ–≤–ї–µ–љ–Є–µ, –≤–Ј—П–≤ –Ј–∞ –Њ—Б–љ–Њ–≤—Г –ї—О–±–Њ–є –і—А—Г–≥–Њ–є –Љ–∞—В–µ—А–Є–∞–ї.
–Ш—В–∞–Ї, –њ—А–Є—Б—В—Г–њ–∞–µ–Љ –Ї –њ–Њ—Б—В—А–Њ–є–Ї–µ –І–Я–£ —Б—В–∞–љ–Ї–∞ —Б–≤–Њ–Є–Љ–Є —А—Г–Ї–∞–Љ–Є.
–Ш–љ—Б—В—А—Г–Љ–µ–љ—В—Л –Є –Љ–∞—В–µ—А–Є–∞–ї—Л: C—Е–µ–Љ–∞ –њ—А–Њ–µ–Ї—В–∞–°—Е–µ–Љ—Г –њ—А–Њ–µ–Ї—В–∞ –Љ–Њ–ґ–љ–Њ —Б–Ї–∞—З–∞—В—М –Ј–і–µ—Б—М. –Ф–ї—П –І–Я–£ –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П 2 —Б–µ—А–≤–Њ–Љ–Њ—В–Њ—А–∞ –њ–Њ—Б—В–Њ—П–љ–љ–Њ–≥–Њ —В–Њ–Ї–∞ –і–ї—П –Њ—Б–µ–є X, Y –Є 1 —И–∞–≥–Њ–≤–Њ–≥–Њ –і–≤–Є–≥–∞—В–µ–ї—П –і–ї—П –Њ—Б–Є Z.
–Э–∞ —Б—Е–µ–Љ–µ –µ—Б—В—М 3 –≥—А—Г–њ–њ—Л: 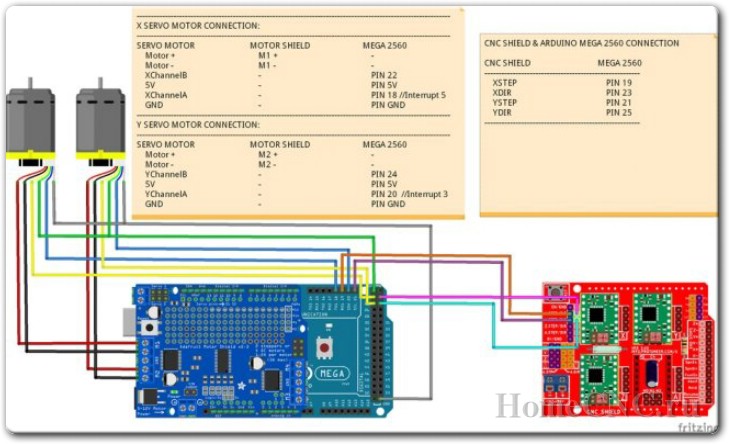
C–µ—А–≤–Њ–і–≤–Є–≥–∞—В–µ–ї—М –њ–Њ—Б—В–Њ—П–љ–љ–Њ–≥–Њ —В–Њ–Ї–∞–Я–∞—А–∞–Љ–µ—В—А—Л –Њ—Б–љ–Њ–≤–љ–Њ–≥–Њ —Б–µ—А–≤–Њ–і–≤–Є–≥–∞—В–µ–ї—П –њ–Њ—Б—В–Њ—П–љ–љ–Њ–≥–Њ —В–Њ–Ї–∞ NF5475E –Њ—В–Љ–µ—З–µ–љ—Л –Ї—А–∞—Б–љ—Л–Љ –њ—А—П–Љ–Њ—Г–≥–Њ–ї—М–љ–Є–Ї–Њ–Љ –љ–∞ —Д–Њ—В–Њ. 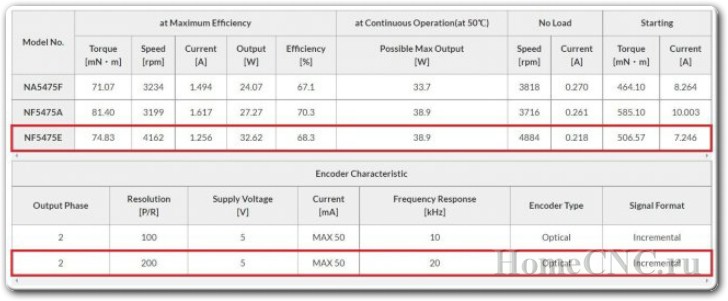
–Ф–ї—П –њ–Є—В–∞–љ–Є—П –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –Є—Б—В–Њ—З–љ–Є–Ї –њ–Є—В–∞–љ–Є—П 12 –Т –њ–Њ—Б—В–Њ—П–љ–љ–Њ–≥–Њ —В–Њ–Ї–∞, –њ–Њ—В–Њ–Љ—Г —З—В–Њ —Н—В–Њ –љ–∞–њ—А—П–ґ–µ–љ–Є–µ —Б–Њ–≤–Љ–µ—Б—В–Є–Љ–Њ —Б L293D Motor Shield. –Х—Б–ї–Є –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М –Є—Б—В–Њ—З–љ–Є–Ї –њ–Є—В–∞–љ–Є—П 24 –Т –њ–Њ—Б—В–Њ—П–љ–љ–Њ–≥–Њ —В–Њ–Ї–∞, –Љ–Њ–і—Г–ї—М —Г–њ—А–∞–≤–ї–µ–љ–Є—П –і–≤–Є–≥–∞—В–µ–ї–µ–Љ –і–Њ–ї–ґ–µ–љ –Є–Љ–µ—В—М –±–Њ–ї–µ–µ –≤—Л—Б–Њ–Ї–Є–є —Г—А–Њ–≤–µ–љ—М –љ–∞–њ—А—П–ґ–µ–љ–Є—П, –љ–∞–њ—А–Є–Љ–µ—А L298N. 
C–±–Њ—А–Ї–∞ —Б—В–∞–љ–Ї–∞
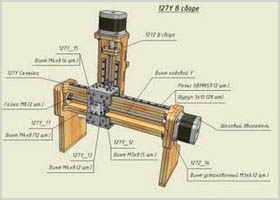
–Я–Њ—Б—В—А–Њ–µ–љ–Є–µ –Њ—Б–Є Y–°–љ–∞—З–∞–ї–∞ –Љ–∞—Б—В–µ—А –Є–Ј–Љ–µ—А—П–µ–Љ –і–≤–Є–≥–∞—В–µ–ї—М, —А–µ–Љ–љ–Є –Є —И–Ї–Є–≤—Л. –Э–∞ —Б—В–∞—А–Њ–Љ —Б–µ—А–≤–Њ–і–≤–Є–≥–∞—В–µ–ї–µ —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ —И–Ї–Є–≤ —Б 20 –Ј—Г–±—М—П–Љ–Є. –Ю–њ—В–Є–Љ–∞–ї–µ–љ —И–Ї–Є–≤ —Б 60 –Ј—Г–±—М—П–Љ–Є + –Ј—Г–±—З–∞—В—Л–є —А–µ–Љ–µ–љ—М 200 –Љ–Љ –і–ї—П –њ—А–Є–≤–Њ–і–∞ —Е–Њ–і–Њ–≤–Њ–≥–Њ –≤–Є–љ—В–∞.  –Т —П—Й–Є–Ї–µ —Б–≤–µ—А–ї–Є–Љ –Њ—В–≤–µ—А—Б—В–Є—П. –£—Б—В–∞–љ–Њ–≤–Є–ї–Є –Њ–њ–Њ—А–љ—Л–µ –њ–Њ–і—И–Є–њ–љ–Є–Ї–Є. –£—Б—В–∞–љ–Њ–≤–Є–ї–Є —Е–Њ–і–Њ–≤–Њ–є –≤–Є–љ—В –Є —Б—В–µ—А–ґ–љ–Є. 
–Ь–Њ–љ—В–∞–ґ —А–∞–±–Њ—З–µ–є –њ–Њ–≤–µ—А—Е–љ–Њ—Б—В–Є –њ–Њ –Њ—Б–Є Y–Т –Ї–∞—З–µ—Б—В–≤–µ —А–∞–±–Њ—З–µ–є –њ–Њ–≤–µ—А—Е–љ–Њ—Б—В–Є –Є—Б–њ–Њ–ї—М–Ј–Њ–≤—Г—О—В –ї–∞–Љ–Є–љ–Є—А–Њ–≤–∞–љ–љ—Г—О –і–Њ—Б–Ї—Г. 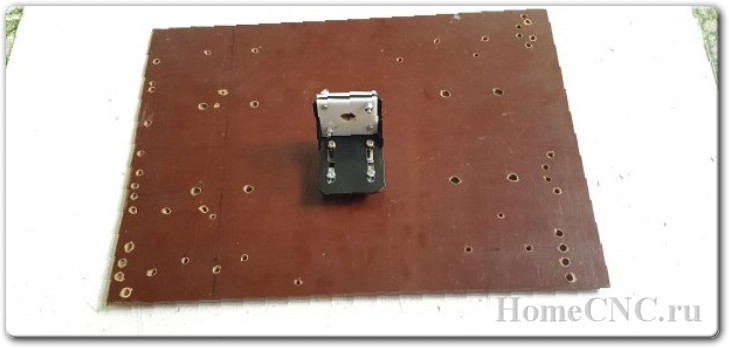 –І—В–Њ–±—Л –Ј–∞–ґ–∞—В—М –Љ–µ–і–љ—Г—О –≥–∞–є–Ї—Г —Е–Њ–і–Њ–≤–Њ–≥–Њ –≤–Є–љ—В–∞, –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї–Є –Њ–њ–Њ—А—Г —И–∞–≥–Њ–≤–Њ–≥–Њ –і–≤–Є–≥–∞—В–µ–ї—П L –Є 2 –∞–Ї—А–Є–ї–Њ–≤—Л–µ –њ–ї–∞—Б—В–Є–љ—Л, –Ї–∞–Ї –љ–∞ –Ї–∞—А—В–Є–љ–Ї–µ –љ–Є–ґ–µ. –Ф–Є–∞–Љ–µ—В—А –Њ—В–≤–µ—А—Б—В–Є—П L-–Њ–±—А–∞–Ј–љ–Њ–є –Њ–њ–Њ—А—Л –Є –Љ–µ–і–љ–Њ–є –≥–∞–є–Ї–Є —Б–Њ–≤–Љ–µ—Й–µ–љ—Л. 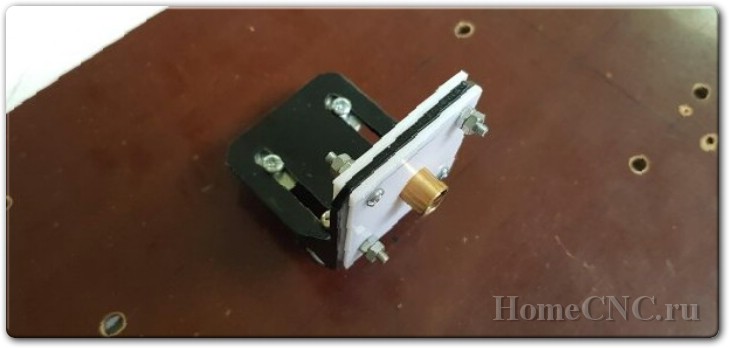 –Ч–∞—В–µ–Љ –њ–ї–∞—В—Д–Њ—А–Љ—Г –љ—Г–ґ–љ–Њ –Ј–∞–Ї—А–µ–њ–Є—В—М –љ–∞ –Њ–њ–Њ—А–љ—Л—Е –њ–Њ–і—И–Є–њ–љ–Є–Ї–∞—Е + —Е–Њ–і–Њ–≤–Њ–є –≤–Є–љ—В. 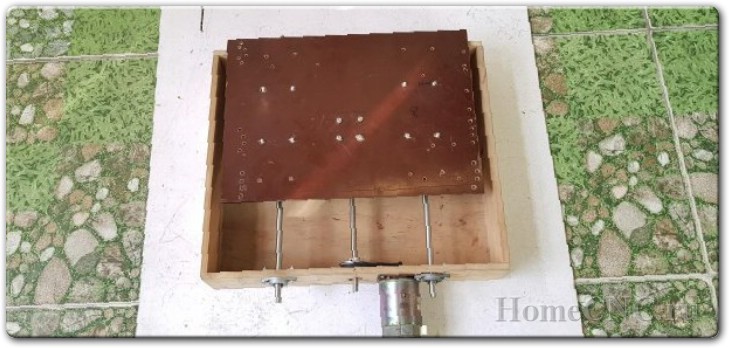 
–Я–Њ—Б—В—А–Њ–µ–љ–Є–µ –Њ—Б–Є X–Ь–∞–ї–µ–љ—М–Ї–∞—П –Ї–Њ—А–Њ–±–Ї–∞ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї–∞—Б—М –і–ї—П —В–Њ–≥–Њ, —З—В–Њ–±—Л –њ–Њ—Б—В—А–Њ–Є—В—М —Б—В—А—Г–Ї—В—Г—А—Г –Њ—Б–Є X. –Ъ–∞–Ї –Є –Њ—Б—М Y, –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї–Є –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л–є —И–Ї–Є–≤ —Б 60 –Ј—Г–±—М—П–Љ–Є –Є –Ј—Г–±—З–∞—В—Л–є —А–µ–Љ–µ–љ—М 200 –Љ–Љ –і–ї—П –њ—А–Є–≤–Њ–і–∞ —Е–Њ–і–Њ–≤–Њ–≥–Њ –≤–Є–љ—В–∞.  –°–µ—А–≤–Њ–і–≤–Є–≥–∞—В–µ–ї—М –Њ—Б–Є X —Б–њ—А—П—В–∞–љ –≤–љ—Г—В—А–Є –Ї–Њ—А–Њ–±–Ї–Є. –Ю–і–Є–љ –∞–Ї—А–Є–ї–Њ–≤—Л–є –ї–Є—Б—В —А–∞–Ј–Љ–µ—А–Њ–Љ 100 x 230 –Љ–Љ –±—Л–ї —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ –љ–∞ –Њ—Б–Є X, –∞ –њ–Њ–Ј–ґ–µ –љ–∞ –љ–µ–Љ –±—Г–і–µ—В —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ CD-–њ—А–Є–≤–Њ–і –і–ї—П –Њ—Б–Є Z.  –Ь–µ–і–љ–∞—П –≥–∞–є–Ї–∞ —Е–Њ–і–Њ–≤–Њ–≥–Њ –≤–Є–љ—В–∞ –Ј–∞–ґ–Є–Љ–∞–µ—В—Б—П –Љ–µ–ґ–і—Г –Њ–њ–Њ—А–Њ–є –і–≤–Є–≥–∞—В–µ–ї—П L-–Њ–±—А–∞–Ј–љ–Њ–є —Д–Њ—А–Љ—Л –Є –і–≤—Г–Љ—П –љ–µ–±–Њ–ї—М—И–Є–Љ–Є –∞–Ї—А–Є–ї–Њ–≤—Л–Љ–Є –ї–Є—Б—В–∞–Љ–Є, –Ї–∞–Ї –Є –Њ—Б—М Y. –Ф–∞–ї—М—И–µ —Б–Њ–±–Є—А–∞–µ—В –і–≤–µ –Њ—Б–Є –≤–Љ–µ—Б—В–µ. 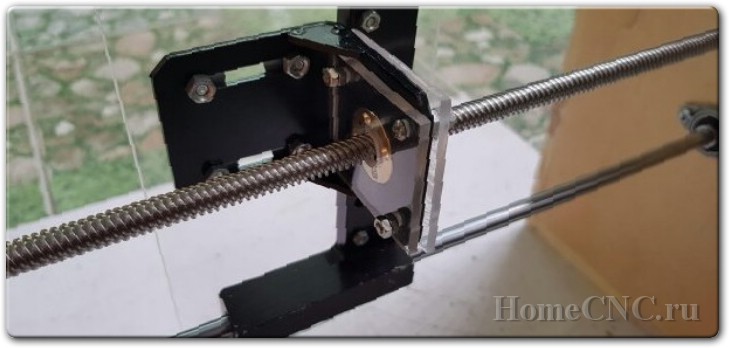 
–Я–Њ—Б—В—А–Њ–µ–љ–Є–µ –Њ—Б–Є Z
–Ф–ї—П –Њ—Б–Є Z –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї—Б—П —Б—В–∞—А—Л–є CD-–њ—А–Є–≤–Њ–і. –†—Г—З–Ї–∞ / –Ї–∞—А–∞–љ–і–∞—И –Ј–∞–ґ–Є–Љ–∞–µ—В—Б—П –∞–ї—О–Љ–Є–љ–Є–µ–≤–Њ–є –Љ—Г—Д—В–Њ–є. 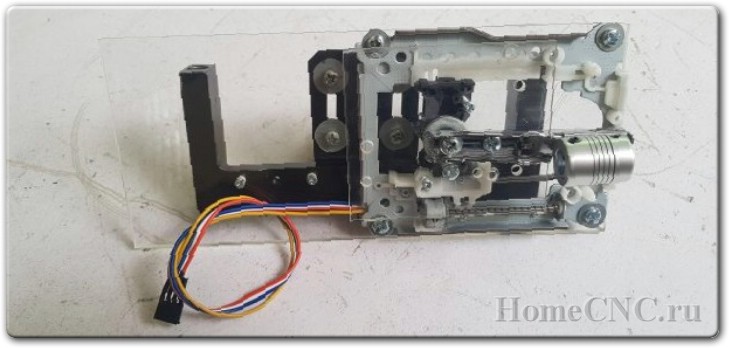 –Ф–∞–ї–µ–µ —А–∞–Љ—Г —Г–Ї—А–µ–њ–Є–ї–Є —И–њ–Є–ї—М–Ї–∞–Љ–Є. –£—Б—В–∞–љ–Њ–≤–Є–ї —А–∞–±–Њ—З–Є–є —Б—В–Њ–ї.  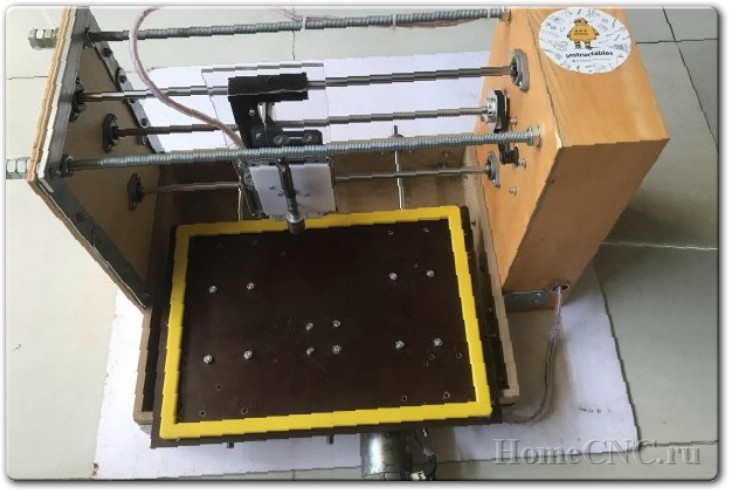 
–Ь–Њ–љ—В–∞–ґ –њ–ї–∞—В—Л —Г–њ—А–∞–≤–ї–µ–љ–Є—П
Arduino Mega Adapter Shield. 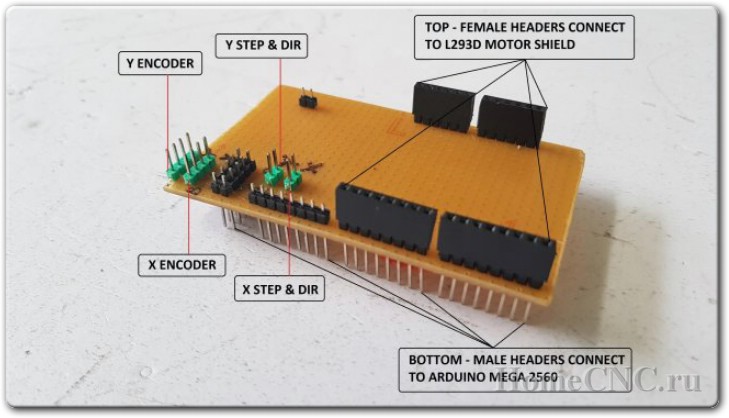 –†–∞—Б–њ–Є–љ–Њ–≤–Ї–∞ —А–∞–Ј—К–µ–Љ–∞ —Н–љ–Ї–Њ–і–µ—А–∞ –љ–∞ —Б–µ—А–≤–Њ–і–≤–Є–≥–∞—В–µ–ї–µ NF5475E, –і–Њ–ї–ґ–љ–∞ –±—Л—В—М —В–∞–Ї–Њ–є, –Ї–∞–Ї –њ–Њ–Ї–∞–Ј–∞–љ–Њ –љ–Є–ґ–µ. 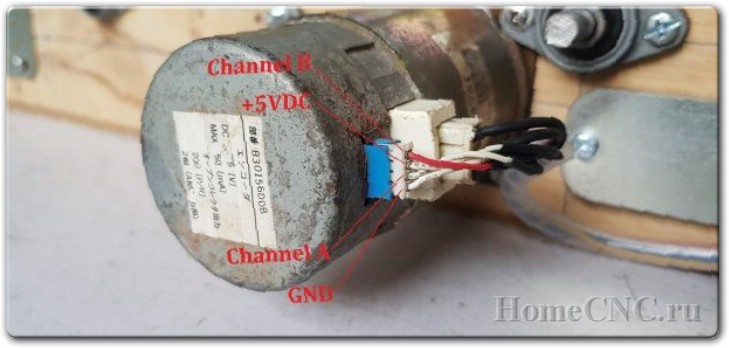
–°–±–Њ—А–Ї–∞ –њ–ї–∞—В—Л —Г–њ—А–∞–≤–ї–µ–љ–Є—П
–Ч–∞—В–µ–Љ —Б–Њ–±–Є—А–∞–µ–Љ –і–µ—В–∞–ї–Є –≤ —Б–ї–µ–і—Г—О—Й–µ–Љ –њ–Њ—А—П–і–Ї–µ: 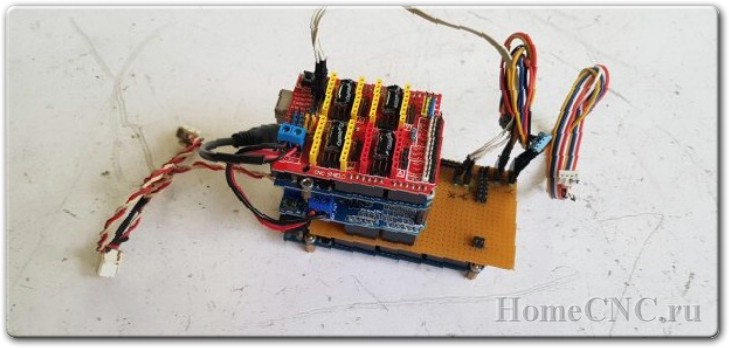
–£—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ–Љ –њ–ї–∞—В—Г —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Є –±–ї–Њ–Ї–Є –њ–Є—В–∞–љ–Є—П (5 –Є 12 –Т –њ–Њ—Б—В–Њ—П–љ–љ–Њ–≥–Њ —В–Њ–Ї–∞) –≤–љ—Г—В—А–Є –Љ–∞–ї–µ–љ—М–Ї–Њ–є –Ї–Њ—А–Њ–±–Ї–Є. 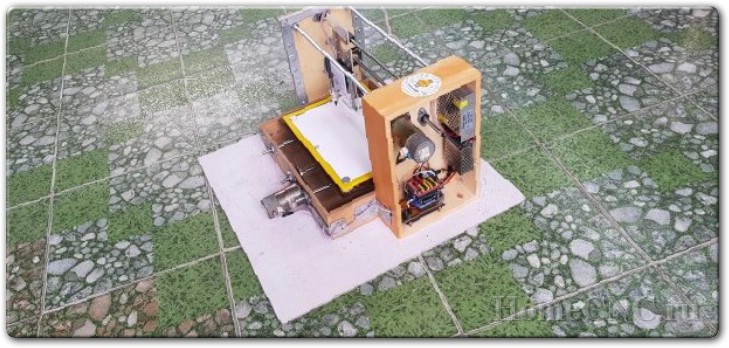 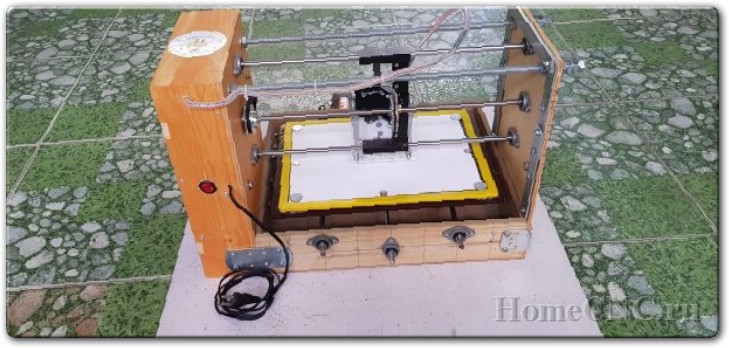 
–Я—А–Њ–≥—А–∞–Љ–Љ–Є—А–Њ–≤–∞–љ–Є–µ–Ъ–Њ–і Arduino Mega 2560 –Љ–Њ–ґ–љ–Њ —Б–Ї–∞—З–∞—В—М —В—Г—В.
–Ф–ї—П —Н—В–Њ–≥–Њ –њ—А–Њ–µ–Ї—В–∞ –љ—Г–ґ–љ–Њ —Г—Б—В–∞–љ–Њ–≤–Є—В—М —Б–ї–µ–і—Г—О—Й–Є–µ –±–Є–±–ї–Є–Њ—В–µ–Ї–Є:
–Я–∞—А–∞–Љ–µ—В—А—Л GRBL–Я–∞—А–∞–Љ–µ—В—А—Л GRBL –і–ї—П –І–Я–£ –≤ —Д–∞–є–ї–µ —Б –Ї–Њ–і–Њ–Љ –і–ї—П –Р—А–і—Г—А–Є–љ—Л. 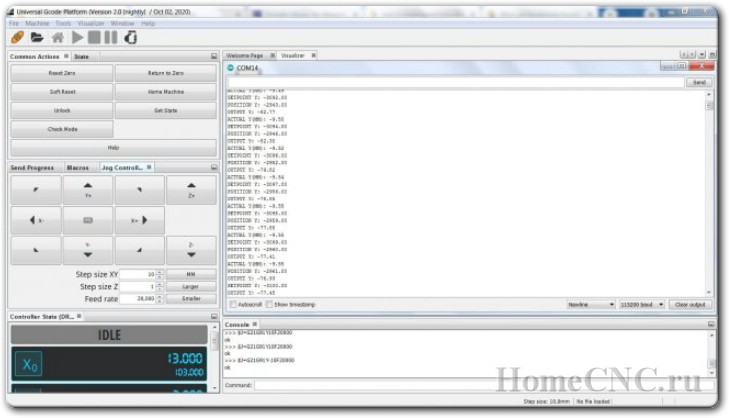
–Э–∞—Б—В—А–Њ–є–Ї–∞ –Я–Ш–Ф-—А–µ–≥—Г–ї—П—В–Њ—А–∞–Ю–њ—В–Є–Љ–∞–ї—М–љ—Л–µ –њ–∞—А–∞–Љ–µ—В—А—Л PID, –Ї–Њ—В–Њ—А—Л–µ —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—В –Ј–љ–∞—З–µ–љ–Є—П–Љ –љ–∞—Б—В—А–Њ–є–Ї–Є GRBL –љ–∞ –њ—А–µ–і—Л–і—Г—Й–µ–Љ —И–∞–≥–µ —Б–ї–µ–і—Г—О—Й–Є–µ: // The PID parameters double KP_X = 10.0; // P for X servo motor double KI_X = 0.03; // I for X servo motor double KD_X = 0.02; // D for X servo motor double KP_Y = 10.0; // P for Y servo motor double KI_Y = 0.03; // I for Y servo motor double KD_Y = 0.02; // D for Y servo motor –Т –њ—А–Њ–µ–Ї—В–µ —В–∞–Ї–ґ–µ –њ—А–Є–Љ–µ–љ–Є–љ–∞ —Д—Г–љ–Ї—Ж–Є—П « d eadband » –≤ –Я–Ш–Ф-—А–µ–≥—Г–ї—П—В–Њ—А–µ. –°–µ—А–≤–Њ–і–≤–Є–≥–∞—В–µ–ї–Є –њ–Њ—Б—В–Њ—П–љ–љ–Њ–≥–Њ —В–Њ–Ї–∞ —А–∞–±–Њ—В–∞—О—В –±–µ–Ј —Б–±–Њ–µ–≤. –Ю–љ–Є –љ–µ –љ–∞–≥—А–µ–≤–∞—О—В—Б—П –Є –љ–µ –њ–µ—А–µ–≥—А–µ–≤–∞—О—В—Б—П, –і–∞–ґ–µ –µ—Б–ї–Є –њ–Њ–і–і–µ—А–ґ–Є–≤–∞–µ—В—Б—П –Є—Е –љ–µ–њ—А–µ—А—Л–≤–љ–∞—П —А–∞–±–Њ—В–∞ –≤ —В–µ—З–µ–љ–Є–µ –Љ–љ–Њ–≥–Є—Е —З–∞—Б–Њ–≤. #define STEPSPERMM_X 300.0 // STEP/mm ($100) is used in the GRBL firmware for DC servo motor X axis. #define DEADBW_X 30.0 // Deadband width in pulses = 30.0 --> Acceptable error for positioning in mm: 0.10mm. #define STEPSPERMM_Y 300.0 // STEP/mm ($101) is used in the GRBL firmware for DC servo motor Y axis. #define DEADBW_Y 30.0 // Deadband width in pulses = 30.0 --> Acceptable error for positioning in mm: 0.10mm.
–Ґ–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–µ
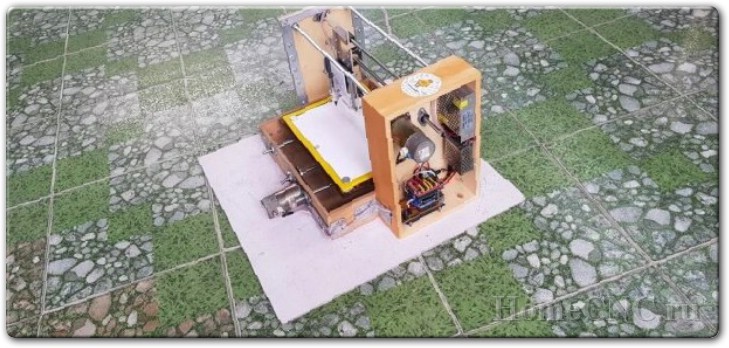
–Ґ–µ–њ–µ—А—М –Љ–Њ–ґ–љ–Њ —Г—Б—В–∞–љ–Њ–≤–Є—В—М —А—Г—З–Ї—Г –≤ –і–µ—А–ґ–∞—В–µ–ї—М, –њ–Њ–Љ–µ—Б—В–Є—В—М –ї–Є—Б—В –љ–∞ —А–∞–±–Њ—З–µ–Љ —Б—В–Њ–ї–µ –Є –њ—А–Њ—В–µ—Б—В–Є—А–Њ–≤–∞—В—М —Г—Б—В—А–Њ–є—Б—В–≤–Њ.  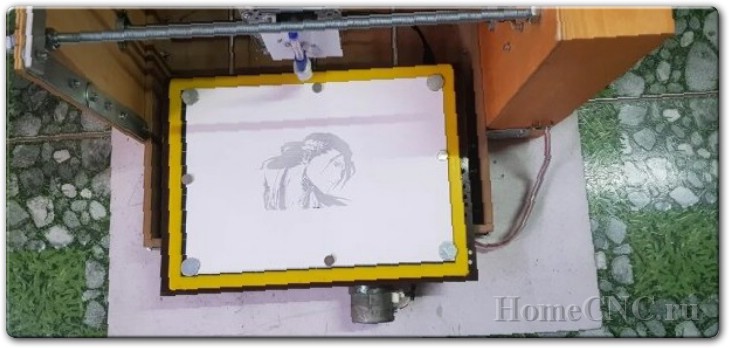  –Т—Б–µ –≥–Њ—В–Њ–≤–Њ. 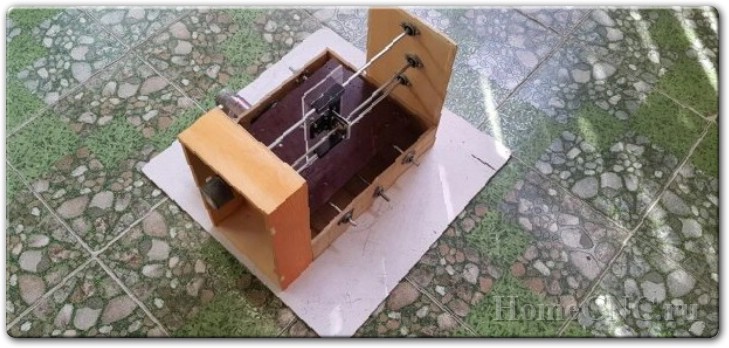   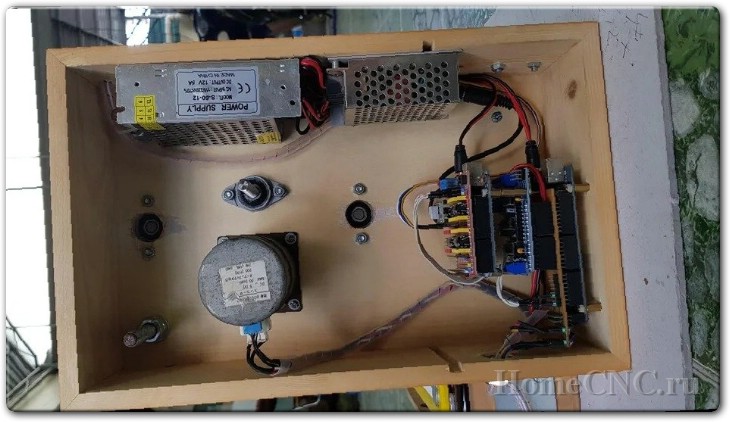 –Я–Њ—Б–Љ–Њ—В—А–Є—В–µ –≤–Є–і–µ–Њ –Ї–∞–Ї —А–∞–±–Њ—В–∞–µ—В —Н—В–Њ—В —Б–∞–Љ–Њ–і–µ–ї—М–љ—Л–є –І–Я–£ —Б—В–∞–љ–Њ–Ї
|

–У—А—Г–њ–њ–∞ VK
–Э–Њ–≤—Л–µ —Б—В–∞—В—М–Є
- –Ш–Ј–≥–Њ—В–Њ–≤–ї–µ–љ–Є–µ –І–Я–£ —Б—В–∞–љ–Ї–∞ –Є–Ј —Д–∞–љ–µ—А—Л —Б–≤–Њ–Є–Љ–Є —А—Г–Ї–∞–Љ–Є
- –°–∞–Љ–Њ–і–µ–ї—М–љ—Л–є –ї–∞–Ј–µ—А –љ–∞ CO2
- –Ъ–∞–Ї —А–∞–Ј—А–∞–±–Њ—В–∞—В—М, —Б–Њ–±—А–∞—В—М –Є –Ј–∞–њ—Г—Б—В–Є—В—М –І–Я–£ —Б—В–∞–љ–Њ–Ї
- –І–Я–£ —Д—А–µ–Ј–µ—А –Є–Ј —Д–∞–љ–µ—А—Л —Б–≤–Њ–Є–Љ–Є —А—Г–Ї–∞–Љ–Є
- –°–∞–Љ–Њ–і–µ–ї—М–љ—Л–є –ї–∞–Ј–µ—А–љ—Л–є SCARA —А–Њ–±–Њ—В-–≥—А–∞–≤–µ—А