Pull Line Plotter
| –°—В–Њ–Є–Љ–Њ—Б—В—М: 51.7 $ |
–Ъ–Є—В–∞–є—Ж—Л —Б–ї–µ–≥–Ї–∞ —Г–њ—А–Њ—Б—В–Є–ї–Є –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є—О, –љ–Њ —Б—Г—В—М –Є —А–∞–±–Њ—В–Њ—Б–њ–Њ—Б–Њ–±–љ–Њ—Б—В—М –Њ—Б—В–∞–ї–∞—Б—М —В–∞ –ґ–µ.
–Т –њ–µ—А–≤–Њ–є —З–∞—Б—В–Є - —А–Є—Б—Г–µ—В —А–∞—Б—В—А–Њ–≤—Л–є —А–Є—Б—Г–љ–Њ–Ї (—Д–Њ—В–Њ–≥—А–∞—Д–Є—О), –њ–Њ—Б–ї–µ –њ–Њ–ї–Њ–≤–Є–љ—Л –≤–Є–і–µ–Њ —А–Є—Б—Г–µ—В –≤–µ–Ї—В–Њ—А–љ—Л–є —З–µ—А—В–µ–ґ –Ц–µ–ї–µ–Ј–љ–Њ–≥–Њ —З–µ–ї–Њ–≤–µ–Ї–∞.
–Э–Њ, –њ–µ—А–µ—Е–Њ–і–Є–Љ –Ї –Є–Ј–≥–Њ—В–Њ–≤–ї–µ–љ–Є—О –≤–µ—А—В–Є–Ї–∞–ї—М–љ–Њ–≥–Њ –њ–ї–Њ—В—В–µ—А–∞
V-Plotter - —Н—В–Њ —Б–≤–Њ–µ–≥–Њ —А–Њ–і–∞ –њ–ї–Њ—В—В–µ—А —Б –І–Я–£, –Ї–Њ—В–Њ—А—Л–є —А–Є—Б—Г–µ—В —В–µ–Ї—Б—В –Є –Є–Ј–Њ–±—А–∞–ґ–µ–љ–Є—П, –њ–µ—А–µ–Љ–µ—Й–∞—П –њ–µ—А–Њ –њ–Њ –≤–µ—А—В–Є–Ї–∞–ї—М–љ–Њ–є –њ–Њ–≤–µ—А—Е–љ–Њ—Б—В–Є. –Ю–љ –Є–Љ–µ–µ—В –њ—А–Њ—Б—В—Г—О –Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї—Г—О –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є—О, –≤ —В–Њ–Љ —З–Є—Б–ї–µ:
–Ю–і–љ–∞ –і–Њ—Б–Ї–∞.
–Ф–≤–∞ —И–∞–≥–Њ–≤—Л—Е –і–≤–Є–≥–∞—В–µ–ї—П —Б–Њ —И–Ї–Є–≤–∞–Љ–Є –Є —А–µ–Љ–љ—П–Љ–Є.
–Ь–Є–Ї—А–Њ-—Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і –њ–Њ–і—К–µ–Љ–∞ —А—Г—З–Ї–Є.
–Я–∞—А–∞ –њ—А–Њ—В–Є–≤–Њ–≤–µ—Б–Њ–≤.
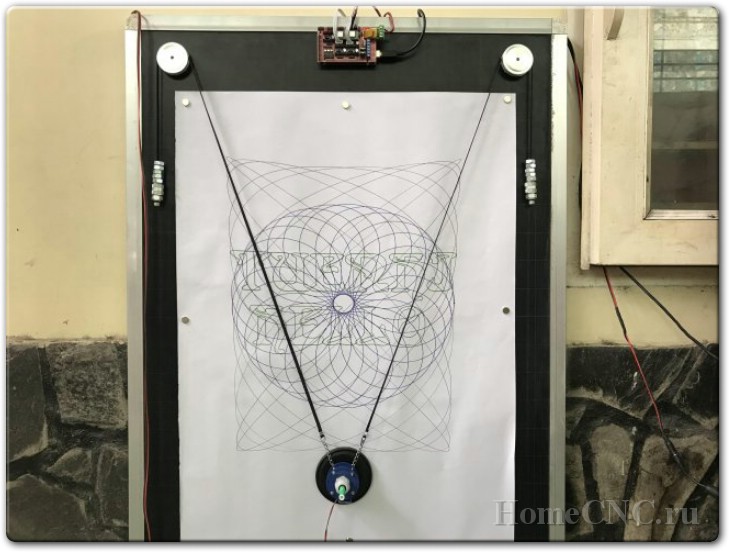
–£ –Љ–∞—Б—В–µ—А–∞ –±—Л–ї–∞ –Ї–ї–∞—Б—Б–љ–∞—П –і–Њ—Б–Ї–∞ —А–∞–Ј–Љ–µ—А–Њ–Љ 780 x 1200 –Љ–Љ, –Ї–Њ—В–Њ—А–Њ–є –µ–≥–Њ –і–µ—В–Є –±–Њ–ї—М—И–µ –љ–µ –њ–Њ–ї—М–Ј—Г—О—В—Б—П. –Ш–Љ–µ–љ–љ–Њ –µ–µ –Њ–љ –Є –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В –≤ –Ї–∞—З–µ—Б—В–≤–µ –Њ—Б–љ–Њ–≤–∞–љ–Є—П –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є–Є.
–†–∞–Ј–Љ–µ—А—Л –њ–ї–Њ—В—В–µ—А–∞ —Б–ї–µ–і—Г—О—Й–Є–µ:
–®–Є—А–Є–љ–∞: 550 –Љ–Љ.
–Т—Л—Б–Њ—В–∞: 800 –Љ–Љ.
–Ф–ї–Є–љ–∞ —А–µ–Љ–љ—П: 1000 –Љ–Љ.
–Я–Њ–і–≥–Њ—В–Њ–≤–Ї–∞ –і–Њ—Б–Ї–Є
–Ъ–ї–∞—Б—Б–љ–∞—П –і–Њ—Б–Ї–∞, –≤–Ї–ї—О—З–∞—П –∞–ї—О–Љ–Є–љ–Є–µ–≤—Г—О —А–∞–Љ–Ї—Г –Є–Љ–µ–µ—В —А–∞–Ј–Љ–µ—А 780 x 1200 –Љ–Љ. –Ґ–Њ–ї—Й–Є–љ–∞ –і–Њ—Б–Ї–Є 30 –Љ–Љ. –° –Њ–і–љ–Њ–є —Б—В–Њ—А–Њ–љ—Л, –њ–Њ —Г–≥–ї–∞–Љ —Б–≤–µ—А–ї—П—В—Б—П –Њ—В–≤–µ—А—Б—В–Є—П –і–ї—П —И–∞–≥–Њ–≤—Л—Е –і–≤–Є–≥–∞—В–µ–ї–µ–є. –†–∞—Б—Б—В–Њ—П–љ–Є–µ –Љ–µ–ґ–і—Г —Ж–µ–љ—В—А–∞–Љ–Є –і–≤—Г—Е –Њ—В–≤–µ—А—Б—В–Є–є 600 –Љ–Љ.
–° –Њ–±—А–∞—В–љ–Њ–є —Б—В–Њ—А–Њ–љ—Л –і–Њ—Б–Ї–Є —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—О—В—Б—П —И–∞–≥–Њ–≤—Л–µ –і–≤–Є–≥–∞—В–µ–ї–Є.
–£—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—О—В—Б—П –љ–∞ –≤–∞–ї—Л –і–≤–Є–≥–∞—В–µ–ї–µ–є —И–Ї–Є–≤—Л. –®–Ї–Є–≤ –Є–Љ–µ–µ—В 80 –Ј—Г–±—М–µ–≤. –®–∞–≥ –Ј—Г–±—М–µ–≤ —И–Ї–Є–≤–∞ GT2 80 —Б–Њ—Б—В–∞–≤–ї—П–µ—В 2 –Љ–Љ –љ–∞ –Ј—Г–±, –њ–Њ—Н—В–Њ–Љ—Г –µ–≥–Њ –і–Є–∞–Љ–µ—В—А —А–∞–≤–µ–љ 80x2 / PI = 50,955 –Љ–Љ.
–°–≤–µ—А–ї—П—В—Б—П 4 –Њ—В–≤–µ—А—Б—В–Є—П –і–ї—П –Ї—А–µ–њ–ї–µ–љ–Є—П –Є —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ—В—Б—П –њ–ї–∞—В–∞ Arduino Mega 2560 + RAMPS 1.4 –њ–Њ —Ж–µ–љ—В—А—Г –≤–µ—А—Е–љ–µ–є —З–∞—Б—В–Є –і–Њ—Б–Ї–Є.
–°–±–Њ—А–Ї–∞ —Г–Ј–ї–∞ –і–µ—А–ґ–∞—В–µ–ї—П —А—Г—З–Ї–Є
–Ю—Б–љ–Њ–≤–љ—Л–Љ–Є –Ї–Њ–Љ–њ–Њ–љ–µ–љ—В–∞–Љ–Є –і–ї—П —Б–±–Њ—А–Ї–Є –і–µ—А–ґ–∞—В–µ–ї—П —А—Г—З–Ї–Є —П–≤–ї—П—О—В—Б—П: —Д–Є—В–Є–љ–≥, –Ї–∞–±–µ–ї—М–љ—Л–є –≤–≤–Њ–і, —А–µ–Љ–µ–љ—М –Є –≥–∞–є–Ї–Є. –Э–Њ, –Љ–Њ–ґ–љ–Њ —А–µ–∞–ї–Є–Ј–Њ–≤–∞—В—М –Є —Б–≤–Њ—О –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є—О.
–°–љ–∞—З–∞–ї–∞ –Њ–љ —А–∞–Ј—А–µ–Ј–∞–Љ 2-–Љ–µ—В—А–Њ–≤—Л–є —А–µ–Љ–µ–љ—М –У–†–Ь –љ–∞ –і–≤–µ —З–∞—Б—В–Є, –Ї–∞–ґ–і–∞—П –њ–Њ 1 –Љ–µ—В—А—Г. –Э–∞ –Њ–і–љ–Њ–є —Б—В–Њ—А–Њ–љ–µ —А–µ–Љ–љ—П, —Б –њ–Њ–Љ–Њ—Й—М—О –Ї–∞–±–µ–ї—М–љ–Њ–є —Б—В—П–ґ–Ї–Є, –Ј–∞–Ї—А–µ–њ–ї—П–µ–Љ –Љ–µ—В–∞–ї–ї–Є—З–µ—Б–Ї—Г—О —Ж–µ–њ–Њ—З–Ї—Г. –Э–∞ –і—А—Г–≥–Њ–є —Б—В–Њ—А–Њ–љ–µ —А–µ–Љ–љ—П –Ј–∞–Ї—А–µ–њ–ї—П–µ–Љ —И—В—Г—Ж–µ—А.
–Т–љ—Г—В—А—М –Ї–∞—В—Г—И–Ї–Є —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ–Љ –і–≤–∞ –Ї–∞–±–µ–ї—М–љ—Л—Е –≤–≤–Њ–і–∞. –Ч–∞—В–µ–Љ —Б–≤–µ—А–ї–Є–Љ –Њ—В–≤–µ—А—Б—В–Є—П –Є —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ–Љ —З–µ—В—Л—А–µ –≤–Є–љ—В–∞.
–Ф–∞–ї—М—И–µ –њ—А–Є–Ї–ї–µ–Є–≤–∞–µ–Љ —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і –≤–љ–Є–Ј—Г –њ–ї–∞—Б—В–Є–Ї–Њ–≤–Њ–є –Ї–∞—В—Г—И–Ї–Є (—Б–Њ —Б—В–Њ—А–Њ–љ—Л –Љ–µ—В–∞–ї–ї–Є—З–µ—Б–Ї–Њ–≥–Њ –Ї–∞–±–µ–ї—М–љ–Њ–≥–Њ –≤–≤–Њ–і–∞) –Є –њ—А–Є–њ–∞–Є–≤–∞–µ–Љ 3 –њ—А–Њ–≤–Њ–і–∞ –Њ—В —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і–∞ –Ї –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А—Г RAMPS 1.4. –Э–∞–Ї–Њ–љ–µ—Ж, –љ–∞ —И–Ї–Є–≤—Л —И–∞–≥–Њ–≤–Њ–≥–Њ –і–≤–Є–≥–∞—В–µ–ї—П –љ–∞–≤–µ—И–Є–≤–∞–µ–Љ –і–µ—А–ґ–∞—В–µ–ї—М —А—Г—З–Ї–Є. –Я—А–Њ–≤–µ—А—П–µ–Љ –њ–µ—А–µ–Љ–µ—Й–µ–љ–Є–µ —Г–Ј–ї–∞.
–Т–Њ –≤—А–µ–Љ—П —З–µ—А—З–µ–љ–Є—П –і–µ—А–ґ–∞—В–µ–ї—М –њ–µ—А–∞ –Љ–Њ–ґ–µ—В —В—А—П—Б—В–Є—Б—М, –њ–Њ—Н—В–Њ–Љ—Г –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –і–Њ–±–∞–≤–Є—В—М –њ—А–Њ—В–Є–≤–Њ–≤–µ—Б—Л –Є–Ј–≥–Њ—В–Њ–≤–ї–µ–љ–љ—Л–µ –Є–Ј –≥–∞–µ–Ї –Ь10.
–Ч–∞–Ї—А–µ–њ–ї—П–µ–Љ –њ–ї–∞—Б—В–Є–Ї–Њ–≤—Г—О –Ї–Њ–ї–µ—Б–Њ –і–Є–∞–Љ–µ—В—А–Њ–Љ 100 –Љ–Љ –Є —В–Њ–ї—Й–Є–љ–Њ–є 10 –Љ–Љ.
–Я—А–Є–Ї–ї–µ–Є–≤–∞–µ–Љ —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і –Ї –Ї–Њ–ї–µ—Б—Г –Є —А–µ–≥—Г–ї–Є—А—Г–µ–Љ —А—Л—З–∞–≥ —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і–∞ —В–∞–Ї, —З—В–Њ–±—Л –Њ–љ –љ–∞—Е–Њ–і–Є–ї—Б—П –Ї–∞–Ї –Љ–Њ–ґ–љ–Њ –±–ї–Є–ґ–µ –Ї –Ї–Њ–љ—З–Є–Ї—Г –њ–µ—А–∞.
–£—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ—В –Ї–∞—А–∞–љ–і–∞—И –Є –њ—А–Њ–≤–µ—А—П–µ—В —А–∞–±–Њ—В—Г.
–Т —В–∞–Ї–Њ–Љ –≤–Є–і–µ –≤–µ—А—В–Є–Ї–∞–ї—М–љ—Л–є –њ–ї–Њ—В—В–µ—А —А–Є—Б—Г–µ—В –њ—А–Њ—Б—В–Њ –Њ—В–ї–Є—З–љ–Њ.
–Я–Њ–і–Ї–ї—О—З–µ–љ–Є–µ —Н–ї–µ–Ї—В—А–Њ–љ–Є–Ї–Є –≤–µ—А—В–Є–Ї–∞–ї—М–љ–Њ–≥–Њ –њ–ї–Њ—В—В–µ—А–∞
–Ю—Б–љ–Њ–≤–љ—Л–Љ–Є –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞–Љ–Є –≤–µ—А—В–Є–Ї–∞–ї—М–љ–Њ–≥–Њ –њ–ї–Њ—В—В–µ—А–∞ —П–≤–ї—П—О—В—Б—П Arduino Mega 2560 –Є RAMPS 1.4. –Ю–љ–Є —Г–њ—А–∞–≤–ї—П—О—В 2 —И–∞–≥–Њ–≤—Л–Љ–Є –і–≤–Є–≥–∞—В–µ–ї—П–Љ–Є —З–µ—А–µ–Ј –і—А–∞–є–≤–µ—А—Л A4988 –Є –Њ–і–љ–Є–Љ —Б–µ—А–≤–Њ–і–≤–Є–≥–∞—В–µ–ї–µ–Љ. –Т–Њ—В —Н—Б–Ї–Є–Ј –њ–Њ–і–Ї–ї—О—З–µ–љ–Є—П —Г—Б—В—А–Њ–є—Б—В–≤–∞.
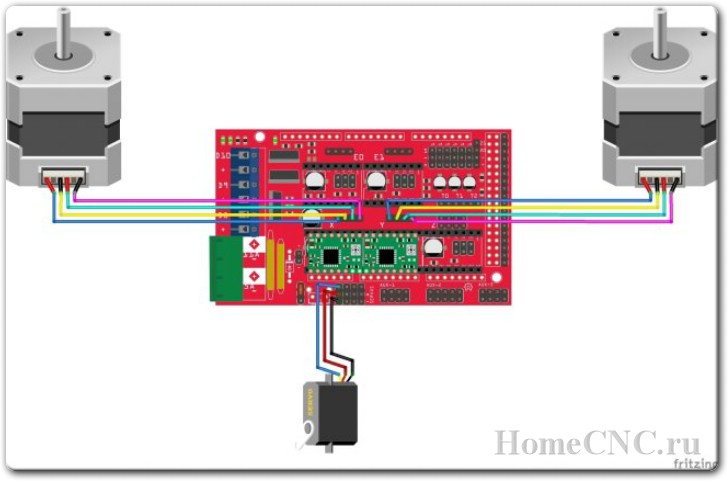
–Ф–ї—П –њ—А–∞–≤–Є–ї—М–љ–Њ–є —А–∞–±–Њ—В—Л –њ–ї–Њ—В—В–µ—А–∞ –і–≤–∞ —И–∞–≥–Њ–≤—Л—Е –і–≤–Є–≥–∞—В–µ–ї—П –і–Њ–ї–ґ–љ—Л –≤—А–∞—Й–∞—В—М—Б—П –≤ –њ—А–Њ—В–Є–≤–Њ–њ–Њ–ї–Њ–ґ–љ—Л—Е –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П—Е, –њ–Њ—Н—В–Њ–Љ—Г –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –њ–Њ–Љ–µ–љ—П—В—М –Љ–µ—Б—В–∞–Љ–Є –њ—А–Њ–≤–Њ–і–∞ –њ—А–∞–≤–Њ–≥–Њ –і–≤–Є–≥–∞—В–µ–ї—П. –Я–Њ–і–Ї–ї—О—З–∞—О—В—Б—П —И–∞–≥–Њ–≤—Л–µ –і–≤–Є–≥–∞—В–µ–ї–Є –ї–µ–≤—Л–є –љ–∞ —И–Є–ї—М–і X, –њ—А–∞–≤—Л–є –љ–∞ —И–Є–ї—М–і Y.
RAMPS 1.4 –Є–Љ–µ–µ—В —З–µ—В—Л—А–µ —И—В–µ–Ї–µ—А–љ—Л—Е —А–∞–Ј—К–µ–Љ–∞ –і–ї—П –њ–Њ–і–Ї–ї—О—З–µ–љ–Є—П —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і–∞: D11, D6, D5 –Є D4. –°–µ—А–≤–Њ–њ—А–Є–≤–Њ–і –њ–Њ–і—К–µ–Љ–∞ –њ–µ—А–∞ —Г–њ—А–∞–≤–ї—П–µ—В—Б—П —И—В–Є—Д—В–Њ–Љ D11.
–І—В–Њ –Ї–∞—Б–∞–µ—В—Б—П –Є—Б—В–Њ—З–љ–Є–Ї–∞ –њ–Є—В–∞–љ–Є—П —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і–∞, —Б–Њ–µ–і–Є–љ—П–µ–Љ –Ї–Њ–љ—В–∞–Ї—В—Л Vcc –Є 5V –≤–Љ–µ—Б—В–µ —Б –њ–Њ–Љ–Њ—Й—М—О –њ–µ—А–µ–Љ—Л—З–Ї–Є. –†–∞–Ј—К–µ–Љ—Л 5V –Є Vcc –і–ї—П –њ–Є—В–∞–љ–Є—П —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і–∞ —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ—Л —А—П–і–Њ–Љ —Б –Ї–љ–Њ–њ–Ї–Њ–є RESET. –≠—В–Њ –њ–Њ–Ј–≤–Њ–ї–Є—В—М –њ–Є—В–∞—В—М –њ–ї–∞—В—Г –Њ—В –њ–ї–∞—В—Л –Р—А–і—Г–Є–љ–Њ. –Э–∞ —Д–Њ—В–Њ –љ–Є–ґ–µ —Б—В—А–µ–ї–Ї–Њ–є —Г–Ї–∞–Ј–∞–љ–Њ –Љ–µ—Б—В–Њ —Г—Б—В–∞–љ–Њ–≤–Ї–Є –њ–µ—А–µ–Љ—Л—З–Ї–Є.
–Ф–ї—П –њ—А–Њ–≥—А–∞–Љ–Љ–Є—А–Њ–≤–∞–љ–Є—П –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї—Б—П –Ї–∞–±–µ–ї—М –Њ—В –њ—А–Є–љ—В–µ—А–∞ HP –і–ї–Є–љ–Њ–є –Њ–Ї–Њ–ї–Њ 1,8 –Љ. –° –Њ–±—А–∞—В–љ–Њ–є —Б—В–Њ—А–Њ–љ—Л –і–Њ—Б–Ї–Є –Ј–∞–Ї—А–µ–њ–ї—П–µ—В—Б—П –Ї–∞–±–µ–ї—М-–Ї–∞–љ–∞–ї –Є –њ—А–Њ–≤–Њ–і–∞ –Ї–ї–∞–і—Г—В—Б—П –≤ –љ–µ–≥–Њ.
–Ф–ї—П —А–∞–±–Њ—В—Л –њ–ї–Њ—В—В–µ—А–∞ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї–∞—Б—М –њ—А–Њ—И–Є–≤–Ї–∞ Makelangelo - . –Я—А–Њ—И–Є–≤–Ї—Г Makelangelo –Љ–Њ–ґ–љ–Њ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М –≤–Њ –Љ–љ–Њ–≥–Є—Е —А–∞–Ј–ї–Є—З–љ—Л—Е –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞—Е –Є –Ї–Є–љ–µ–Љ–∞—В–Є—З–µ—Б–Ї–Є—Е —Б–Є—Б—В–µ–Љ–∞—Е.
-
–Т–Љ–µ—Б—В–µ —Б –≥–Њ—В–Њ–≤—Л–Љ –њ–ї–Њ—В—В–µ—А–Њ–Љ –Ї–Њ—В–Њ—А—Л–є –Љ–Њ–ґ–љ–Њ –Ј–∞–Ї–∞–Ј–∞—В—М —Б –Р–ї–Є–≠–Ї—Б–њ—А–µ—Б—Б –њ–Њ —Б—Б—Л–ї–Ї–µ –≤—Л—И–µ, –Є–і–µ—В –≥–Њ—В–Њ–≤–Њ–µ –Я–Ю, –Ї–Њ—В–Њ—А–Њ–µ –љ–µ —В—А–µ—Г–µ—В –і–Њ—А–∞–±—В–Њ–Ї, –њ—А–Њ—И–Є–≤–Ї–∞ —Г–ґ–µ –Ј–ї–Є—В–∞ –≤ –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А.
–Ф–ї—П —Б–∞–Љ–Њ–і–µ–ї—М–љ–Њ–≥–Њ –≤–∞—А–Є–∞–љ—В–∞ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –≤–љ–µ—Б—В–Є –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ –Є–Ј–Љ–µ–љ–µ–љ–Є–є –≤ –њ—А–Њ—И–Є–≤–Ї—Г Mekalangelo, —З—В–Њ–±—Л –Њ–љ–∞ –±—Л–ї–∞ —Б–Њ–≤–Љ–µ—Б—В–Є–Љ–∞ —Б –і–∞–љ–љ—Л–Љ –њ–ї–Њ—В—В–µ—А–Њ–Љ.
-–Я–∞—А–∞–Љ–µ—В—А—Л –Ї–Њ–љ—Д–Є–≥—Г—А–∞—Ж–Є–Є –і–ї—П –≤–µ—А—В–Є–Ї–∞–ї—М–љ–Њ–≥–Њ –њ–ї–Њ—В—В–µ—А–∞: "configure.h ".
- –Ґ–Є–њ –њ–ї–Њ—В—В–µ—А–∞: Polargraph
#define POLARGRAPH 1 // polargraph like Makelangelo
#define TRADITIONALXY 3 // gantry 3 axis setup.
#define COREXY 2 // gantry CoreXY setup.
#define ZARPLOTTER 4 // 4 motor, x-shaped 2D motion
#define SKYCAM 5 // 4 motor, x-shaped 3D motion
#define DELTA 6 // 3 arm delta robot, rotary action. untested.
#define STEWART 7 // 6 arm stewart platform, rotary action. untested.
#define ARM3 8 // 3DOF palletizing robot arm.
#define SIXI 9 // 6DOF robot arm.
#define TRADITIONAL6 10 // 6 axis machine, no restrictions.
#define SCARA 11 // 2 axis SCARA.
- –Я–Њ—В–і–µ—А–ґ–Є–≤–∞–µ–Љ—Л–µ –Љ–Є–Ї—А–Њ–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А—Л
#define BOARD_RUMBA 1 // Reprap discount Rumba board
#define BOARD_RAMPS 2 // Mega2560 + Ramps 1.4
#define BOARD_SANGUINOLULU 3 // Sanguinolulu
#define BOARD_TEENSYLU 4 // Teensylu
#define BOARD_WEMOS 5 // Wemos D1 R2 + CNC Shield v3 (see board_wemos.h)
#define BOARD_SIXI_MEGA 6 // Arduino Mega + custom shield for Sixi 2 robot
#define BOARD_CNCV3 7 // Mega2560 + CNC Shield v3
#define BOARD_ESP32 8 // ESP32 + Marginally Clever Polargraph PCB.
- –Ъ–Њ–љ—В—А–Њ–ї–ї–µ—А: Arduino Mega 2560 + RAMPS 1.4
- –Э–µ—В –Ц–Ъ-–і–Є—Б–њ–ї–µ—П
//------------------------------------------------------------------------------
// Robot styles supported
//------------------------------------------------------------------------------
#define MACHINE_STYLE POLARGRAPH
//------------------------------------------------------------------------------
// LCD panels supported
//------------------------------------------------------------------------------
#define LCD_TYPE LCD_NONE
//------------------------------------------------------------------------------
// Microcontrollers supported
//------------------------------------------------------------------------------
#define MOTHERBOARD BOARD_RAMPS
-–Я–∞—А–∞–Љ–µ—В—А—Л –Ї–Њ–љ—Д–Є–≥—Г—А–∞—Ж–Є–Є –і–ї—П –њ–Њ–ї—П—А–Њ–≥—А–∞—Д–∞: "robot_polargraph.h "
- –Т–µ—А—Б–Є—П: MAKELANGELO_5
- –° —А—Г—З–љ—Л–Љ –њ–Њ–і—К–µ–Љ–љ–Є–Ї–Њ–Љ.
- –С–µ–Ј –Ц–Ъ-–і–Є—Б–њ–ї–µ—П - –С–µ–Ј SDCard - –С–µ–Ј –Ї–Њ–љ—Ж–µ–≤—Л—Е –≤—Л–Ї–ї—О—З–∞—В–µ–ї–µ–є.
#define MACHINE_HARDWARE_VERSION MAKELANGELO_5 // Change me
#define MACHINE_HAS_LIFTABLE_PEN
.................................................
#if MACHINE_HARDWARE_VERSION == MAKELANGELO_5
#ifndef MAX_SEGMENTS
#define MAX_SEGMENTS (32)
#endif
//#define USE_LIMIT_SWITCH
//#define HAS_SD
//#define HAS_LCD
#endif
-–Э–∞—Б—В—А–Њ–є–Ї–Є —И–∞–≥–Њ–≤–Њ–≥–Њ –і–≤–Є–≥–∞—В–µ–ї—П –Є —И–Ї–Є–≤–∞: "configMotors.h ".
- –Ю–љ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї —И–∞–≥–Њ–≤—Л–µ –і–≤–Є–≥–∞—В–µ–ї–Є NEMA 17 —Б —Г–≥–ї–Њ–Љ —И–∞–≥–∞: 1,8 °. –Ґ–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ —И–∞–≥–Њ–≤, –љ–µ–Њ–±—Е–Њ–і–Є–Љ—Л—Е –і–ї—П —В–Њ–≥–Њ, —З—В–Њ–±—Л —И–∞–≥–Њ–≤—Л–µ –і–≤–Є–≥–∞—В–µ–ї–Є —Б–Њ–≤–µ—А—И–Є–ї–Є 1 –њ–Њ–ї–љ—Л–є –Њ–±–Њ—А–Њ—В: 200 —И–∞–≥–Њ–≤ / –Њ–±–Њ—А–Њ—В.
- –Э–∞—Б—В—А–Њ–є–Ї–∞ –Љ–Є–Ї—А–Њ—И–∞–≥–Њ–≤ A4988: 1/16. (–Ф—А–∞–є–≤–µ—А A4988 –њ–Њ–Ј–≤–Њ–ї—П–µ—В —Г–≤–µ–ї–Є—З–Є—В—М —Н—В–Њ –Ј–љ–∞—З–µ–љ–Є–µ –Ј–∞ —Б—З–µ—В –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є —Г–њ—А–∞–≤–ї–µ–љ–Є—П –њ—А–Њ–Љ–µ–ґ—Г—В–Њ—З–љ—Л–Љ–Є —И–∞–≥–∞–Љ–Є –Є –Є–Љ–µ–µ—В –њ—П—В—М —А–µ–ґ–Є–Љ–Њ–≤ –Љ–Є–Ї—А–Њ—И–∞–≥–∞ (1(–њ–Њ–ї–љ—Л–є), 1/2, 1/4, 1/8 –Є 1/16).)
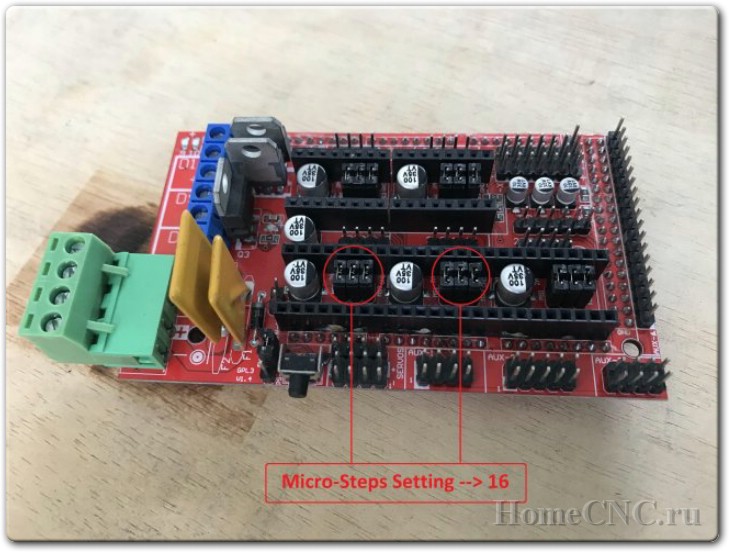
- –Т –њ–ї–Њ—В—В–µ—А–µ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї—Б—П —А–µ–Љ–µ–љ—М –У–†–Ь GT2 —Б —И–∞–≥–Њ–Љ 2 –Љ–Љ –љ–∞ –Ј—Г–± –Є —И–Ї–Є–≤—Л GT2-80 —Б 80 –Ј—Г–±—М—П–Љ–Є. –Ч–љ–∞—З–µ–љ–Є–µ 80x2 = 160 –Љ–Љ –®–∞–≥ —И–Ї–Є–≤–∞ –Њ–Ј–љ–∞—З–∞–µ—В –і–ї–Є–љ—Г –Њ–Ї—А—Г–ґ–љ–Њ—Б—В–Є —И–Ї–Є–≤–Њ–≤ (–і–Є–∞–Љ–µ—В—А —И–Ї–Є–≤–∞ = 160 / PI = 50,9 –Љ–Љ) –Є–ї–Є —А–∞—Б—Б—В–Њ—П–љ–Є–µ –њ–µ—А–µ–Љ–µ—Й–µ–љ–Є—П –Ј—Г–±—З–∞—В—Л—Е —А–µ–Љ–љ–µ–є, –Ї–Њ–≥–і–∞ —И–∞–≥–Њ–≤—Л–µ –і–≤–Є–≥–∞—В–µ–ї–Є —Б–Њ–≤–µ—А—И–∞—О—В 1 –Њ–±–Њ—А–Њ—В.
-–Э–∞—Б—В—А–Њ–є–Ї–∞ –Ї–Њ–љ—В–∞–Ї—В–Њ–≤ Arduino Mega 2560: "board_ramps.h "
–Ю–±—А–∞—В–Є—В–µ –≤–љ–Є–Љ–∞–љ–Є–µ, —З—В–Њ RAMPS 1.4 –Є–Љ–µ–µ—В —З–µ—В—Л—А–µ —И—В–µ–Ї–µ—А–љ—Л—Е —А–∞–Ј—К–µ–Љ–∞ —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і–∞, –њ—А–Є–≤—П–Ј–∞–љ–љ—Л—Е –Ї –Ї–Њ–љ—В–∞–Ї—В–∞–Љ D11, D6, D5 –Є D4. –Т –і–∞–љ–љ–Њ–Љ —Г—Б—В—А–Њ–є—Б—В–≤–µ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї—Б—П —И—В–Є—Д—В D11 –і–ї—П —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і–Њ–Љ –њ–Њ–і—К–µ–Љ–∞ —А—Г—З–Ї–Є.
–Я—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–µ –Њ–±–µ—Б–њ–µ—З–µ–љ–Є–µ
–Я—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–µ –Њ–±–µ—Б–њ–µ—З–µ–љ–Є–µ Makelangelo - —Н—В–Њ –Ї–Њ–Љ–њ—М—О—В–µ—А–љ—Л–є –Є–љ—Б—В—А—Г–Љ–µ–љ—В, —Б–Њ–і–µ—А–ґ–∞—Й–Є–є –≤—Б–µ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ–µ –і–ї—П –љ–∞—Б—В—А–Њ–є–Ї–Є –Є —Н–Ї—Б–њ–Њ—А—В–∞ —Д–∞–є–ї–Њ–≤ –њ–µ—З–∞—В–Є –і–ї—П –≤–µ—А—В–Є–Ї–∞–ї—М–љ–Њ–≥–Њ –њ–ї–Њ—В—В–µ—А–∞. –Ю–љ –њ–Њ–Ј–≤–Њ–ї—П–µ—В –љ–∞—Б—В—А–∞–Є–≤–∞—В—М –Ї–Њ–љ—Д–Є–≥—Г—А–∞—Ж–Є—О –њ–ї–Њ—В—В–µ—А–∞, —А–∞–Ј–Љ–µ—А –±—Г–Љ–∞–≥–Є, –љ–∞—Б—В—А–Њ–є–Ї—Г —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і–∞ –њ–Њ–і—К–µ–Љ–∞ –њ–µ—А–∞. –Ъ—А–Њ–Љ–µ —В–Њ–≥–Њ, –Њ–љ —В–∞–Ї–ґ–µ –Є–Љ–µ–µ—В –≤—Б—В—А–Њ–µ–љ–љ—Л–µ –Є–љ—Б—В—А—Г–Љ–µ–љ—В—Л –і–ї—П –њ—А–µ–Њ–±—А–∞–Ј–Њ–≤–∞–љ–Є—П –Є–Ј–Њ–±—А–∞–ґ–µ–љ–Є–є –≤ GCODE –Є –Њ—В–њ—А–∞–≤–Ї–Є –Є—Е –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А—Г –њ–ї–Њ—В—В–µ—А–∞.
–Ю —В–Њ–Љ, –Ї–∞–Ї –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М –њ—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–µ –Њ–±–µ—Б–њ–µ—З–µ–љ–Є–µ Makelangego, –Љ–Њ–ґ–љ–Њ —Г–Ј–љ–∞—В—М .
–Ю—В–Ї—А–Њ–є—В–µ –њ—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–µ –Њ–±–µ—Б–њ–µ—З–µ–љ–Є–µ Makelangelo –Є –њ–Њ–і–Ї–ї—О—З–Є—В–µ—Б—М –Ї Arduino Mega 2560.
–Ф–∞–ї—М—И–µ –љ—Г–ґ–љ–Њ –њ—А–Њ–≤–µ—А–Є—В—М –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–µ –і–≤–Є–ґ–µ–љ–Є—П –≤–∞–ї–Њ–≤ —И–∞–≥–Њ–≤—Л—Е –і–≤–Є–≥–∞—В–µ–ї–µ–є –Є —А–∞—Б—Б—В–Њ—П–љ–Є–µ –њ–µ—А–µ–Љ–µ—Й–µ–љ–Є—П.
–Ш–Ј —А–∞—Б–Ї—А—Л–≤–∞—О—Й–µ–≥–Њ—Б—П —Б–њ–Є—Б–Ї–∞ –љ—Г–ґ–љ–Њ –≤—Л–±—А–∞—В—М "Manual Driving" –Є –њ–Њ–љ–∞–ґ–Є–Љ–∞—В—М –Ї–љ–Њ–њ–Ї–Є –≤–ї–µ–≤–Њ, –≤–њ—А–∞–≤–Њ, –≤–≤–µ—А—Е, –≤–љ–Є–Ј, —Б –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л–Љ–Є —А–∞—Б—Б—В–Њ—П–љ–Є—П–Љ–Є –њ–µ—А–µ–Љ–µ—Й–µ–љ–Є—П 1, 10, 100 –Љ–Љ.
–Э–∞–ґ–Љ–Є—В–µ –Ї–љ–Њ–њ–Ї–Є Pen up/ Pen down, —З—В–Њ–±—Л –њ—А–Њ–≤–µ—А–Є—В—М —А–∞–±–Њ—В—Г —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і–∞.
–Ф–∞–ї—М—И–µ –љ—Г–ґ–љ–Њ –Њ—В–Ї—А—Л—В—М –≤–Ї–ї–∞–і–Ї—Г "Setting" –Є —Г—Б—В–∞–љ–Њ–≤–Є—В—М —А—П–і –љ–∞—Б—В—А–Њ–µ–Ї.
- Model: Makelangelo (Custom).
- Machine Width: 550 (mm).
- Machine Height: 800 (mm).
- Acceleration: 10 (mm/s).
–£—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ–Љ —А–∞–Ј–Љ–µ—А –±—Г–Љ–∞–≥–Є –Є –њ–Њ–ї—П.
–Э–∞—Б—В—А–∞–Є–≤–µ–Љ –њ–µ—А–Њ –Є —Б–Ї–Њ—А–Њ—Б—В—М —А–Є—Б–Њ–≤–∞–љ–Є—П. –Я–Њ–і—К–µ–Љ —А—Г—З–Ї–Є –≤–≤–µ—А—Е / –≤–љ–Є–Ј –Љ–Њ–ґ–љ–Њ –Њ—В–Ї–∞–ї–Є–±—А–Њ–≤–∞—В—М, —А–µ–≥—Г–ї–Є—А—Г—П –Ј–љ–∞—З–µ–љ–Є—П —Г–≥–ї–∞ —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і–∞, —Б–Ї–Њ—А–Њ—Б—В—М –њ–Њ–і—К–µ–Љ–∞ –Є –Ї–љ–Њ–њ–Ї–Є " Test ".
–Ф–∞–ї—М—И–µ –љ—Г–ґ–љ–Њ –љ–∞–ґ–∞—В—М –љ–∞ "Generate art", –≤—Л–±—А–∞—В—М –≥—А–∞—Д–Є–Ї –Є –љ–∞—Б—В—А–Њ–Є—В—М –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л–µ –њ–∞—А–∞–Љ–µ—В—А—Л –њ–Њ —Г—Б–Љ–Њ—В—А–µ–љ–Є—О.
–Ч–∞—В–µ–Љ –љ—Г–ґ–љ–Њ –љ–∞–ґ–∞—В—М "Open File", —З—В–Њ–±—Л –≤—Л–±—А–∞—В—М –Є–Ј–Њ–±—А–∞–ґ–µ–љ–Є—П. –Я—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–µ –Њ–±–µ—Б–њ–µ—З–µ–љ–Є–µ Makelangelo –Љ–Њ–ґ–µ—В –Ї–Њ–љ–≤–µ—А—В–Є—А–Њ–≤–∞—В—М –Є–Ј–Њ–±—А–∞–ґ–µ–љ–Є—П JPG, PNG, BMP, GIF –Є–ї–Є DXF / SVG –≤ GCODE –≤ –љ–µ—Б–Ї–Њ–ї—М–Ї–Є—Е —Б—В–Є–ї—П—Е —Д–Њ—А–Љ–∞—В–∞ –њ—А–µ–Њ–±—А–∞–Ј–Њ–≤–∞–љ–Є—П.
{ads}
–Ґ–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–µ
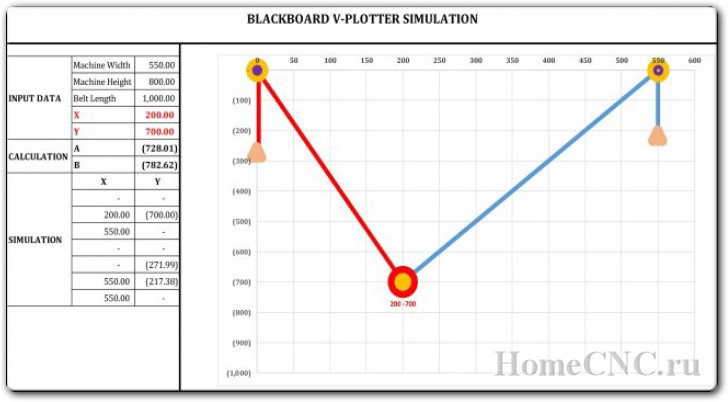
–°–Ї–∞—З–Є–≤–∞–µ–Љ https://content.instructables.com/ORIG/FAH/W2EW/KJ2UV8P2/FAHW2EWKJ2UV8P2.xls –і–ї—П –Є–Љ–Є—В–∞—Ж–Є–Є –≤–µ—А—В–Є–Ї–∞–ї—М–љ–Њ–≥–Њ –њ–ї–Њ—В—В–µ—А–∞.
–Э—Г–ґ–љ–Њ –≤–≤–µ—Б—В–Є –Ї–Њ–Њ—А–і–Є–љ–∞—В—Л X, Y, –Є —И–∞–±–ї–Њ–љ Excel –±—Г–і–µ—В –Љ–Њ–і–µ–ї–Є—А–Њ–≤–∞—В—М –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –њ–µ—А–∞, –∞ —В–∞–Ї–ґ–µ –і–ї–Є–љ—Г —А–µ–Љ–љ—П –Њ—В —И–Ї–Є–≤–Њ–≤ –і–Њ –њ–µ—А–∞ –Є –Њ—В —И–Ї–Є–≤–Њ–≤ –і–Њ –њ—А–Њ—В–Є–≤–Њ–≤–µ—Б–Њ–≤.
–І—В–Њ–±—Л –њ—А–Њ–≤–µ—Б—В–Є –њ–µ—А–≤—Л–є —В–µ—Б—В, –Є—Б–њ–Њ–ї—М–Ј—Г–µ–Љ –≤—Б—В—А–Њ–µ–љ–љ—Г—О —Д—Г–љ–Ї—Ж–Є—О "Generate art", –і–∞–ї–µ–µ "Your message here". –Т —А–∞—Б–Ї—А—Л–≤–∞—О—Й–µ–Љ—Б—П —Б–њ–Є—Б–Ї–µ, –≤—Л–±–Є—А–∞–µ–Љ —А–∞–Ј–Љ–µ—А –Є —И—А–Є—Д—В, –љ–∞–±–Є—А–∞–µ–Љ —Б–Њ–Њ–±—Й–µ–љ–Є–µ (–љ–∞–і–њ–Є—Б—М) –Є –љ–∞–ґ–Є–Љ–∞–µ–Љ "Start".
–Э–Є–ґ–µ —А–µ–Ј—Г–ї—М—В–∞—В.
–Ґ–µ—Б—В —Д–Є–≥—Г—А—Л "Lissajous" –Є–Ј –≤–Ї–ї–∞–і–Ї–Є "Generate art".
–Ґ–µ—Б—В —Д–Є–≥—Г—А—Л "Spirograph".
–†–Є—Б—Г–љ–Њ–Ї –њ–Њ—Б–ї–µ —А–∞—Б–Ї—А–∞—И–Є–≤–∞–љ–Є—П –≤—А—Г—З–љ—Г—О.
–Ф–∞–ї—М—И–µ –њ—А–Њ–±—Г–µ–Љ –љ–∞—А–Є—Б–Њ–≤–∞—В—М –њ–Њ—А—В—А–µ—В.
–†–µ–Ј—Г–ї—М—В–∞—В –Њ—В–ї–Є—З–љ—Л–є.
–Ф–ї—П —А–∞–±–Њ—В—Л —Б —Д–Њ—В–Њ –љ—Г–ґ–љ–Њ —Н–Ї—Б–њ–Њ—А—В–Є—А–Њ–≤–∞—В—М –Є–Ј–Њ–±—А–∞–ґ–µ–љ–Є–µ –≤ —Д–Њ—А–Љ–∞—В–µ DXF / SVG –Є–Ј Inkscape —Б —А–∞—Б—И–Є—А–µ–љ–Є—П–Љ–Є —И—В—А–Є—Е–Њ–≤–Ї–Є, –Ј–∞—В–µ–Љ –Њ—В–Ї—А—Л—В—М —Н—В–Њ—В —Д–∞–є–ї DXF / SVG –≤ Makelangelo, –њ—А–Њ—Б—В–Њ –љ–∞–ґ–∞–≤ «–Я—Г—Б–Ї» –і–ї—П –≤—Л–њ–Њ–ї–љ–µ–љ–Є—П.
–Т—Б–µ –≥–Њ—В–Њ–≤–Њ.
–Э–µ–Ї–Њ—В–Њ—А—Л–µ –Љ–Њ–Љ–µ–љ—В—Л —Б–±–Њ—А–Ї–Є –њ–ї–Њ—В—В–µ—А–∞, –∞ —В–∞–Ї–ґ–µ –і–µ–Љ–Њ–љ—Б—В—А–∞—Ж–Є—О –µ–≥–Њ —А–∞–±–Њ—В—Л –Љ–Њ–ґ–љ–Њ –њ–Њ—Б–Љ–Њ—В—А–µ—В—М –љ–∞ –≤–Є–і–µ–Њ.
–°–∞–Љ–Њ–і–µ–ї—М–љ—Л–є –І–Я–£ —Б—В–∞–љ–Њ–Ї