–ü–Ķ—Ä–Ķ–ī —ā–Ķ–ľ, –ļ–į–ļ –ī–Ķ–Ľ–į—ā—Ć –Ī–ĺ–Ľ–Ķ–Ķ —Ā–ĺ–≤–Ķ—Ä—ą–Ķ–Ĺ–Ĺ—č–Ļ –ł –Ī–ĺ–Ľ–Ķ–Ķ –ľ–ĺ—Č–Ĺ—č–Ļ –Ľ–į–∑–Ķ—Ä–Ĺ—č–Ļ –≥—Ä–į–≤–Ķ—Ä, —Ä–Ķ—ą–ł–Ľ –ł—Ā–Ņ—Ä–ĺ–Ī–ĺ–≤–į—ā—Ć «–ľ–į–ļ–Ķ—ā–Ĺ—č–Ļ» –≤–į—Ä–ł–į–Ĺ—ā.
–Ē–Ľ—Ź –Ņ—Ä–ĺ–Ī—č –ł –ľ–Ķ–Ľ–ļ–ł—Ö —Ä–į–Ī–ĺ—ā –≥–ĺ–ī–ł—ā—Ā—Ź. –Ė–Ķ–Ľ–į—é—Č–ł–Ķ —Ā–ľ–ĺ–≥—É—ā —Ā–ĺ–Ī—Ä–į—ā—Ć –≤ —ā–Ķ—á–Ķ–Ĺ–ł–ł 2 –ī–Ĺ–Ķ–Ļ, –Ņ—Ä–ł –Ĺ–į–Ľ–ł—á–ł–ł –ļ–ĺ–ľ–Ņ–Ľ–Ķ–ļ—ā—É—é—Č–ł—Ö, –ł–Ľ–ł, (–ļ–į–ļ —Ź) –≤ —ā–Ķ—á–Ķ–Ĺ–ł–ł –ľ–Ķ—Ā—Ź—Ü–į, —ā.–ļ. –Ĺ–Ķ –≤—Ā–Ķ –ī–Ķ—ā–į–Ľ–ł –Ī—č–Ľ–ł –≤ –Ĺ–į–Ľ–ł—á–ł–ł.
–Ē–Ľ—Ź –Ĺ–į—á–į–Ľ–į, –Ņ–ĺ–≥–ĺ–≤–ĺ—Ä–ł–ľ –ĺ —Ā—ā–į–Ĺ–ł–Ĺ–Ķ — –ĺ–Ĺ–į —Ź–≤–Ľ—Ź–Ķ—ā—Ā—Ź –ĺ—Ā–Ĺ–ĺ–≤–ĺ–Ļ –ī–Ľ—Ź –≤—Ā–Ķ–≥–ĺ —Ā—ā–į–Ĺ–ļ–į. –°—ā–į–Ĺ–ł–Ĺ—É –ī–Ķ–Ľ–į–Ľ –Ņ–ĺ –ľ–Ĺ–ĺ–≥–ĺ—á–ł—Ā–Ľ–Ķ–Ĺ–Ĺ—č–ľ –≤–ł–ī–Ķ–ĺ –≤ –ł–Ĺ—ā–Ķ—Ä–Ĺ–Ķ—ā–Ķ — –Ĺ–į CD-Rom-–į—Ö.
–°—ā–į—Ä–į–Ľ—Ā—Ź –≤—č–Ī–ł—Ä–į—ā—Ć —Ā –ĺ–ī–ł–Ĺ–į–ļ–ĺ–≤—č–ľ–ł –ľ–ĺ—ā–ĺ—Ä–į–ľ–ł, –Ĺ–ĺ –ī–≤—É—Ö –ĺ–ī–ł–Ĺ–į–ļ–ĺ–≤—č—Ö –Ĺ–Ķ —Ā–ľ–ĺ–≥ –Ĺ–į–Ļ—ā–ł.
–ö —Ā–ĺ–∂–į–Ľ–Ķ–Ĺ–ł—é, –Ĺ–Ķ –ī–Ķ–Ľ–į–Ľ —Ą–ĺ—ā–ĺ —Ā–Ī–ĺ—Ä–ļ–ł —Ā—ā–į–Ĺ–ł–Ĺ—č, –Ĺ–ĺ –Ķ—Ā–Ľ–ł «–Ĺ–į –Ņ–į–Ľ—Ć—Ü–į—Ö», —ā–ĺ –Ĺ–Ķ–ĺ–Ī—Ö–ĺ–ī–ł–ľ–ĺ –≤—č—Ā—ā–į–≤–ł—ā—Ć 90 –≥—Ä–į–ī—É—Ā–ĺ–≤ — —ć—ā–ĺ –≥–Ľ–į–≤–Ĺ–ĺ–Ķ. –Ě—É –ł –ĺ—Ā–Ĺ–ĺ–≤–į –Ņ–ĺ–ī —Ā—ā–į–Ĺ–ł–Ĺ—É — –Ņ–ĺ–ī–Ľ–ĺ–∂–ļ–į.
–Į —Ā–ī–Ķ–Ľ–į–Ľ –ł–∑ –Ĺ–Ķ—Ä–į–Ī–ĺ—á–Ķ–Ļ –Ņ–Ľ–į–Ĺ—ą–Ķ—ā–ļ–ł. –Ě–į –ī–Ĺ–ĺ –Ņ—Ä–ł–ļ—Ä—É—ā–ł–Ľ –ī–Ľ—Ź –≥–į—ą–Ķ–Ĺ–ł—Ź –≤–ł–Ī—Ä–į—Ü–ł–Ļ –Ņ—Ä–ł —Ä–į–Ī–ĺ—ā–Ķ —Ā—ā–į–Ĺ–ļ–į.
–í—Ā–Ķ –Ī–ĺ–Ľ—ā–ł–ļ–ł, –≥–į–Ķ—á–ļ–ł, —É–≥–ĺ–Ľ–ļ–ł –ł –Ņ—Ä–ĺ—á–Ķ–Ķ, –ļ—É–Ņ–Ľ–Ķ–Ĺ–ĺ –≤ –Ī–Ľ–ł–∂–į–Ļ—ą–Ķ–ľ —Ā—ā—Ä–ĺ–ł—ā–Ķ–Ľ—Ć–Ĺ–ĺ–ľ –ľ–į–≥–į–∑–ł–Ĺ–Ķ.
–Ē–Ľ—Ź –≤–ī–ĺ—Ö–Ĺ–ĺ–≤–Ľ–Ķ–Ĺ–ł—Ź –ł—Ā–Ņ–ĺ–Ľ—Ć–∑–ĺ–≤–į–Ľ –≤–ł–ī–Ķ–ĺ, –≤ –ļ–ĺ—ā–ĺ—Ä–ĺ–ľ –Ņ–ĺ–ļ–į–∑–į–Ĺ –ľ–ĺ–ľ–Ķ–Ĺ—ā —Ā–Ī–ĺ—Ä–ļ–ł —Ā—ā–į–Ĺ–ł–Ĺ—č:
–í–ł–ī–Ķ–ĺ –≤–ī–ĺ—Ö–Ĺ–ĺ–≤–Ķ–Ĺ–ł—Ź
–°—ā–ĺ–Ľ–ł–ļ –Ņ–ĺ–ī –≥—Ä–į–≤–ł—Ä—É–Ķ–ľ—č–Ķ –Ņ—Ä–Ķ–ī–ľ–Ķ—ā—č —Ā–ī–Ķ–Ľ–į–Ľ –ł–∑ –ĺ–Ī—č—á–Ĺ–ĺ–≥–ĺ —á–Ķ—Ä–Ĺ–ĺ–≥–ĺ –Ņ–Ľ–į—Ā—ā–ł–ļ–į 2,5–ľ–ľ.
–ě—Ā–Ĺ–į—Č–Ķ–Ĺ–ł–Ķ —Ā—ā–į–Ĺ–ł–Ĺ—č — –ī–Ķ–Ľ–ĺ –≤–į—Ä–ł–į—ā–ł–≤–Ĺ–ĺ–Ķ. –Ē–Ķ–Ľ–į–Ķ–ľ –ł–∑ —ā–ĺ–≥–ĺ, —á—ā–ĺ –Ķ—Ā—ā—Ć). –ó–į–≥–ĺ—ā–ĺ–≤–ļ–į –Ĺ–į —Ā—ā–ĺ–Ľ–ł–ļ–Ķ(–≤ –ľ–ĺ–Ķ–ľ —Ā–Ľ—É—á–į–Ķ) –∑–į–ļ—Ä–Ķ–Ņ–Ľ—Ź–Ķ—ā—Ā—Ź –Ņ–ĺ–Ľ–ĺ—Ā–ļ–ĺ–Ļ –ļ–į–Ĺ—Ü–Ķ–Ľ—Ź—Ä—Ā–ļ–ĺ–≥–ĺ —ā–ĺ–Ĺ–ļ–ĺ–≥–ĺ –ī–≤—É—Ā—ā–ĺ—Ä–ĺ–Ĺ–Ĺ–Ķ–≥–ĺ —Ā–ļ–ĺ—ā—á–į. –í –≤–į—ą–Ķ–ľ —Ā–Ľ—É—á–į–Ķ –ľ–ĺ–∂–Ķ—ā –Ī—č—ā—Ć –ł –ī—Ä—É–≥–ĺ–Ļ –ľ–Ķ—ā–ĺ–ī –ļ—Ä–Ķ–Ņ–Ľ–Ķ–Ĺ–ł—Ź.
–∑–į–ļ–į–∑–į–Ľ –Ĺ–į 650Nm –ł 200mw. –ö –Ĺ–Ķ–ľ—É –ĺ—ā–ī–Ķ–Ľ—Ć–Ĺ–ĺ –∑–į–ļ–į–∑–į–Ľ
–ī–Ľ—Ź –∑–į—Č–ł—ā—č –∑—Ä–Ķ–Ĺ–ł—Ź(–Ĺ–ĺ —Ź –Ĺ–Ķ —É–≤–Ķ—Ä–Ķ–Ĺ —á—ā–ĺ –ĺ–Ĺ–ł —Ā–ł–Ľ—Ć–Ĺ–ĺ –Ņ–ĺ–ľ–ĺ–≥–į—é—ā — –Ľ—É—á –≤–ł–ī–Ķ–Ĺ, —Ö–ĺ—ā—Ć –ł –ľ–Ķ–Ĺ–Ķ–Ķ —Ź—Ä–ļ–ĺ. –í –ļ–ĺ–ľ–ľ–Ķ–Ĺ—ā–į—Ä–ł—Ź—Ö –Ņ–ĺ–ī—Ā–ļ–į–∑–į–Ľ–ł —á—ā–ĺ —Ź –ļ—É–Ņ–ł–Ľ –Ĺ–Ķ —ā–Ķ –ĺ—á–ļ–ł.)
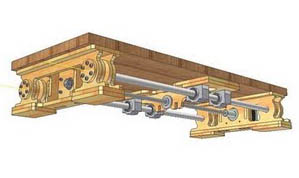
–°—ā–į–Ĺ–ĺ–ļ —Ā–ī–Ķ–Ľ–į–Ĺ –Ņ–ĺ —Ā—Ö–Ķ–ľ–Ķ, –ļ–ĺ—ā–ĺ—Ä–į—Ź –≥—É–Ľ—Ź–Ķ—ā –Ņ–ĺ –ł–Ĺ—ā–Ķ—Ä–Ĺ–Ķ—ā—É —É–∂–Ķ –Ĺ–Ķ –Ņ–Ķ—Ä–≤—č–Ļ –≥–ĺ–ī:
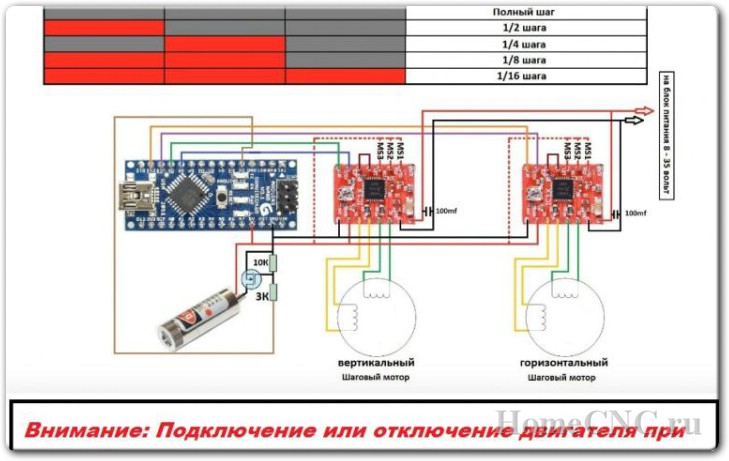
–ö–į–ļ –≤–ł–ī–ł–ľ, –Ņ–ĺ–ľ–ł–ľ–ĺ –Ľ–į–∑–Ķ—Ä–į, –Ĺ—É–∂–Ķ–Ĺ —ā—Ä–į–Ĺ–∑–ł—Ā—ā–ĺ—Ä, –į—Ä–ī—É–ł–Ĺ–ĺ –Ĺ–į–Ĺ–ĺ, –ī—Ä–į–Ļ–≤–Ķ—Ä –ī–≤–ł–≥–į—ā–Ķ–Ľ—Ź, –Ņ–į—Ä—É —Ä–Ķ–∑–ł—Ā—ā–ĺ—Ä–ĺ–≤.
–Ę—Ä–į–Ĺ–∑–ł—Ā—ā–ĺ—Ä –≤–∑—Ź–Ľ IRFZ44N.
–Ę.–ļ. –ľ–ĺ—ā–ĺ—Ä—č –ī–Ķ–Ľ–į—é—ā 20 —ą–į–≥–ĺ–≤ –Ĺ–į –Ņ–ĺ–Ľ–Ĺ—č–Ļ –ĺ–Ī–ĺ—Ä–ĺ—ā, –į —ą–į–≥ —Ö–ĺ–ī–ĺ–≤–ĺ–≥–ĺ –≤–ł–Ĺ—ā–į 3–ľ–ľ, —ā–ĺ –∑–į –ĺ–ī–ł–Ĺ –ĺ–Ī–ĺ—Ä–ĺ—ā —Ö–ĺ–ī–ĺ–≤–ĺ–≥–ĺ –≤–ł–Ĺ—ā–į, –ļ–į—Ä–Ķ—ā–ļ–į –Ņ–Ķ—Ä–Ķ–ī–≤–ł–Ĺ–Ķ—ā—Ā—Ź –Ĺ–į 3 –ľ–ľ.
–Ē–Ķ–Ľ–ł–ľ —ą–į–≥ –•–í, –Ĺ–į –ļ–ĺ–Ľ-–≤–ĺ —ą–į–≥–ĺ–≤ –ľ–ĺ—ā–ĺ—Ä–į (–Ņ—Ä–ł –Ņ–ĺ–Ľ–Ĺ–ĺ–ľ –ĺ–Ī–ĺ—Ä–ĺ—ā–Ķ) –ł –Ņ–ĺ–Ľ—É—á–į–Ķ–ľ 0,15 –ľ–ľ –Ĺ–į –ĺ–ī–ł–Ĺ —ą–į–≥ — –Ĺ–į—ą–Ķ —Ä–į–∑—Ä–Ķ—ą–Ķ–Ĺ–ł–Ķ. –†–į–Ī–ĺ—á–į—Ź —á–į—Ā—ā—Ć —Ā–ĺ—Ā—ā–į–≤–Ľ—Ź–Ķ—ā 40–ľ–ľ*40–ľ–ľ.
–ź –≤–ĺ—ā –ī–Ľ—Ź —É–≤–Ķ–Ľ–ł—á–Ķ–Ĺ–ł—Ź —Ä–į–∑—Ä–Ķ—ą–Ķ–Ĺ–ł—Ź —Ź –Ņ—Ä–ł–ľ–Ķ–Ĺ–ł–Ľ –ī—Ä–į–Ļ–≤–Ķ—Ä –ľ–ĺ—ā–ĺ—Ä–į A4988
(–ļ–ĺ—ā–ĺ—Ä—č–Ļ –ĺ–Ī–Ķ—Ā–Ņ–Ķ—á–ł–≤–į–Ķ—ā –Ī–Ķ–∑ —Ä–į–ī–ł–į—ā–ĺ—Ä–į –ī–ĺ 1–ź, —Ā —Ä–į–ī–ł–į—ā–ĺ—Ä–ĺ–ľ –ī–ĺ 2–ź) —Ā —Ä–Ķ–≥—É–Ľ–ł—Ä—É–Ķ–ľ—č–ľ –ĺ–≥—Ä–į–Ĺ–ł—á–ł—ā–Ķ–Ľ–Ķ–ľ —ā–ĺ–ļ–į(—Ā –≤–ĺ–∑–ľ–ĺ–∂–Ĺ–ĺ—Ā—ā—Ć—é –Ņ–ł—ā–į–Ĺ–ł—Ź –ľ–ĺ—ā–ĺ—Ä–į –Ĺ–į–ľ–Ĺ–ĺ–≥–ĺ –Ī–ĺ–Ľ—Ć—ą–ł–ľ –Ĺ–į–Ņ—Ä—Ź–∂–Ķ–Ĺ–ł–Ķ–ľ –ī–Ľ—Ź —É–≤–Ķ–Ľ–ł—á–Ķ–Ĺ–ł—Ź —Ā–ļ–ĺ—Ä–ĺ—Ā—ā–ł) –ł –Ņ–ĺ–ī–ī–Ķ—Ä–∂–ļ–ĺ–Ļ «–ľ–ł–ļ—Ä–ĺ—ą–į–≥–į» — –Ņ—Ä–ĺ–≥—Ä–į–ľ–ľ–Ĺ–ĺ–Ļ —Ą–ł—ą–ļ–ĺ–Ļ.
–í —ć—ā–ĺ–ľ —Ä–Ķ–∂–ł–ľ–Ķ, —Ā—ā–į–Ĺ–ī–į—Ä—ā–Ĺ—č–Ļ —ą–į–≥ –ľ–ĺ—ā–ĺ—Ä–į –ī–Ķ–Ľ–ł—ā—Ā—Ź –Ĺ–į 2\4\8\16(–≤—č–Ī–ł—Ä–į–Ķ—ā—Ā—Ź –Ņ–Ķ—Ä–Ķ–ľ—č—á–ļ–į–ľ–ł –Ĺ–į –ī—Ä–į–Ļ–≤–Ķ—Ä–Ķ).
–£ –Ĺ–į—Ā –ľ–ĺ—ā–ĺ—Ä—č —Ā —É–≥–Ľ–ĺ–ľ —ą–į–≥–į 18–≥—Ä–į–ī., –ł –ī–Ľ—Ź –Ņ–ĺ–Ľ–Ĺ–ĺ–≥–ĺ –ĺ–Ī–ĺ—Ä–ĺ—ā–į –Ņ–ĺ—ā—Ä–Ķ–Ī—É–Ķ—ā—Ā—Ź 20 —ą–į–≥–ĺ–≤.
–Į –≤—č–Ī—Ä–į–Ľ —É–ľ–Ĺ–ĺ–∂–ł—ā–Ķ–Ľ—Ć 4(—Ā–ľ—č—Ā–Ľ –Ī—Ä–į—ā—Ć 8 –ł–Ľ–ł 16 –Ĺ–Ķ—ā, —ā.–ļ. —Ź —Ą–ł–∑–ł—á–Ķ—Ā–ļ–ł –Ĺ–Ķ —Ā–ľ–ĺ–≥—É —Ā—Ą–ĺ–ļ—É—Ā–ł—Ä–ĺ–≤–į—ā—Ć –Ľ—É—á —ā–ĺ—á–Ĺ–ĺ, –ī–į –ł –≤—Ä–Ķ–ľ—Ź –≥—Ä–į–≤–ł—Ä–ĺ–≤–ļ–ł —Ā–ł–Ľ—Ć–Ĺ–ĺ —É–≤–Ķ–Ľ–ł—á–ł—ā—Ā—Ź)
–ė —ā–Ķ–Ņ–Ķ—Ä—Ć —É –ľ–ĺ—ā–ĺ—Ä–į —É–≥–ĺ–Ľ —ą–į–≥–į —Ā—ā–į–Ĺ–ĺ–≤–ł—ā—Ā—Ź 4,5–≥—Ä–į–ī. –ł–Ľ–ł 80 —ą–į–≥–ĺ–≤ –Ĺ–į –ĺ–Ī–ĺ—Ä–ĺ—ā, –į —Ä–į–∑—Ä–Ķ—ą–Ķ–Ĺ–ł–Ķ 0,0375–ľ–ľ. –Ĺ–į —ą–į–≥.
–Ě–ĺ –Ķ—Ā—ā—Ć –ł –ľ–ł–Ĺ—É—Ā: –ü—Ä–ł —É–≤–Ķ–Ľ–ł—á–Ķ–Ĺ–ł–ł —Ä–į–∑—Ä–Ķ—ą–Ķ–Ĺ–ł—Ź(–≤—č–Ī–ĺ—Ä —Ä–Ķ–∂–ł–ľ–į –Ĺ–į–Ņ—Ä–ł–ľ–Ķ—Ä 16—Ö), —É–≤–Ķ–Ľ–ł—á–ł–≤–į–Ķ—ā—Ā—Ź –ł –≤—Ä–Ķ–ľ—Ź –≥—Ä–į–≤–ł—Ä–ĺ–≤–ļ–ł, –ł –ī–į–∂–Ķ —É–≤–Ķ–Ľ–ł—á–Ķ–Ĺ–ł–Ķ —Ā–ļ–ĺ—Ä–ĺ—Ā—ā–ł –ľ–ĺ—ā–ĺ—Ä–į –Ĺ–Ķ –ľ–ĺ–∂–Ķ—ā –Ĺ–ł–≤–Ķ–Ľ–ł—Ä–ĺ–≤–į—ā—Ć —ć—ā–ĺ –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł–Ķ –≤–Ķ—Č–Ķ–Ļ.
–í–ļ–Ľ—é—á–Ķ–Ĺ–ł–Ķ —Ä–Ķ–∂–ł–ľ–ĺ–≤ –ľ–ł–ļ—Ä–ĺ—ą–į–≥–į –ĺ—Ā—É—Č–Ķ—Ā—ā–≤–Ľ—Ź–Ķ—ā—Ā—Ź –Ņ–ĺ–ī–į—á–Ķ–Ļ VCC –ļ –ļ–ĺ–Ĺ—ā–į–ļ—ā–į–ľ MS1, MS2, MS3.
–í –ľ–ĺ–Ķ–ľ —Ā–Ľ—É—á–į–Ķ, —Ź –Ņ–ĺ—Ā–į–ī–ł–Ľ MS2 –ļ –Ņ–Ľ—é—Ā—É –ł –Ņ–ĺ–Ľ—É—á–ł–Ľ —Ä–į–∑—Ä–Ķ—ą–Ķ–Ĺ–ł–Ķ –ľ–ł–ļ—Ä–ĺ—ą–į–≥–į –≤ 1/4 —ą–į–≥–į.
–ü–ĺ—Ā–Ľ–Ķ —Ā–Ī–ĺ—Ä–ļ–ł –ł –≤–ļ–Ľ—é—á–Ķ–Ĺ–ł—Ź –Ņ–ł—ā–į–Ĺ–ł—Ź, –Ņ—Ä–ĺ–ł–∑–≤–Ķ–Ľ –Ĺ–į—Ā—ā—Ä–ĺ–Ļ–ļ—É —ā–ĺ–ļ–į –ī—Ä–į–Ļ–≤–Ķ—Ä–į:
–Ě–į –Ņ–Ľ–į—ā–Ķ –ī—Ä–į–Ļ–≤–Ķ—Ä–į –ł–ľ–Ķ–Ķ—ā—Ā—Ź –Ņ–ĺ–ī—Ā—ā—Ä–ĺ–Ķ—á–Ĺ—č–Ļ —Ä–Ķ–∑–ł—Ā—ā–ĺ—Ä, –ī–Ľ—Ź –Ĺ–į—Ā—ā—Ä–ĺ–Ļ–ļ–ł –ł—Ā–Ņ–ĺ–Ľ—Ć–∑—É–Ķ–ľ –≤–ĺ–Ľ—Ć—ā–ľ–Ķ—ā—Ä, –ĺ–ī–ł–Ĺ –ł–∑ —Č—É–Ņ–ĺ–≤ –ļ–ĺ—ā–ĺ—Ä–ĺ–≥–ĺ(—á–Ķ—Ä–Ĺ—č–Ļ), –Ņ–ĺ–ī–ļ–Ľ—é—á–Ķ–Ĺ –ļ –∑–Ķ–ľ–Ľ–Ķ, –į –≤—ā–ĺ—Ä–ĺ–Ļ –ļ –ĺ—ā–≤–Ķ—Ä—ā–ļ–Ķ, –ļ–ĺ—ā–ĺ—Ä–ĺ–Ļ –Ī—É–ī–Ķ–ľ —ā–ł—Ö–ĺ–Ĺ—Ć–ļ–ĺ –≤—Ä–į—Č–į—ā—Ć –Ņ–ĺ–ī—Ā—ā—Ä–ĺ–Ķ—á–Ĺ–ł–ļ, –ī–ĺ –Ņ–ĺ–Ľ—É—á–Ķ–Ĺ–ł—Ź –ĺ–Ņ—ā–ł–ľ–į–Ľ—Ć–Ĺ–ĺ–≥–ĺ –∑–Ĺ–į—á–Ķ–Ĺ–ł—Ź, –Ņ—Ä–ł –ļ–ĺ—ā–ĺ—Ä–ĺ–ľ –ľ–ĺ—ā–ĺ—Ä—č –Ĺ–Ķ –Ņ–Ķ—Ä–Ķ–≥—Ä–Ķ–≤–į—é—ā—Ā—Ź –Ņ—Ä–ł —Ä–į–Ī–ĺ—ā–Ķ.
–Ē–Ľ—Ź –Ĺ–į—á–į–Ľ–į –Ĺ–į–ī–ĺ –Ņ–ĺ—Ā—ā–į–≤–ł—ā—Ć –ĺ–Ņ—ā–ł–ľ–į–Ľ—Ć–Ĺ–ĺ–Ķ –ī–Ľ—Ź –Ī–ĺ–Ľ—Ć—ą–ł–Ĺ—Ā—ā–≤–į –ľ–ĺ—ā–ĺ—Ä–ĺ–≤ –∑–Ĺ–į—á–Ķ–Ĺ–ł–Ķ, –ļ–ĺ—ā–ĺ—Ä–ĺ–Ķ –≤—č—Ā—á–ł—ā—č–≤–į–Ķ–ľ –Ņ–ĺ —Ą–ĺ—Ä–ľ—É–Ľ–Ķ: I=Uref/(8*Rs) –≥–ī–Ķ:
I=–Ę–ĺ–ļ,
Uref=–ĺ–Ņ–ĺ—Ä–Ĺ–ĺ–Ķ –Ĺ–į–Ņ—Ä. –∑–į–ľ–Ķ—Ä—Ź–Ķ–ľ–ĺ–Ķ –Ĺ–į–ľ–ł –Ĺ–į –Ņ–ĺ–ī—Ā—ā—Ä–ĺ–Ķ—á–Ĺ–ł–ļ–Ķ,
Rs=—Ā–ĺ–Ņ—Ä–ĺ—ā–ł–≤–Ľ–Ķ–Ĺ–ł–Ķ —Ä–Ķ–∑–ł—Ā—ā–ĺ—Ä–ĺ–≤ S1–• S2–• –Ĺ–į –Ņ–Ľ–į—ā–Ķ –ī—Ä–į–Ļ–≤–Ķ—Ä–į.
–Ē–Ľ—Ź –ľ–ĺ—ā–ĺ—Ä–ĺ–≤ –ĺ—ā –Ī–ĺ–Ľ—Ć—ą–ł–Ĺ—Ā—ā–≤–į CD-Rom, —ā–ĺ–ļ —Ā–ĺ—Ā—ā–į–≤–Ľ—Ź–Ķ—ā 500mA. (–ö—Ā—ā–į—ā–ł, –Ņ–Ķ—Ä–≤–ł—á–Ĺ—č–Ķ –ł –≤—ā–ĺ—Ä–ł—á–Ĺ—č–Ķ –ĺ–Ī–ľ–ĺ—ā–ļ–ł –ł—Ā–ļ–į–Ľ –ľ–Ķ—ā–ĺ–ī–ĺ–ľ —ā—č–ļ–į, –Ĺ–į 4 –≤–į—Ä–ł–į–Ĺ—ā–Ķ –Ĺ–į—ą–Ķ–Ľ –Ĺ—É–∂–Ĺ–ĺ–Ķ –Ņ–ĺ–ī–ļ–Ľ—é—á–Ķ–Ĺ–ł–Ķ, –į –Ņ—Ä–ĺ–≤–Ķ—Ä—Ź–Ľ —Ä—É—á–Ĺ—č–ľ —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł–Ķ–ľ –≤ –Ņ—Ä–ĺ–≥—Ä–į–ľ–ľ–Ķ).
–†–Ķ–∑–ł—Ā—ā–ĺ—Ä—č –Ĺ–į –ī—Ä–į–Ļ–≤–Ķ—Ä–Ķ —Ā—ā–ĺ—Ź—ā –Ĺ–į 0.1 –ě–ľ(–≤ –ľ–ĺ–Ķ–ľ —Ā–Ľ—É—á–į–Ķ, –≤ –≤–į—ą–Ķ–ľ –ľ–ĺ–∂–Ķ—ā –Ī—č—ā—Ć –ī—Ä—É–≥–ł–Ķ –∑–Ĺ–į—á–Ķ–Ĺ–ł—Ź).
–°–ĺ–ĺ—ā–≤–Ķ—ā—Ā—ā–≤–Ķ–Ĺ–Ĺ–ĺ, –ī–Ľ—Ź –Ĺ–į—á–į–Ľ–į, –Ĺ—É–∂–Ĺ–ĺ —É—Ā—ā–į–Ĺ–ĺ–≤–ł—ā—Ć –ĺ–Ņ–ĺ—Ä–Ĺ–ĺ–Ķ –Ĺ–į–Ņ—Ä—Ź–∂–Ķ–Ĺ–ł–Ķ –≤ 0,4 –≤–ĺ–Ľ—Ć—ā–į.
–í –ī–į–Ľ—Ć–Ĺ–Ķ–Ļ—ą–Ķ–ľ, –ľ–ĺ–∂–Ĺ–ĺ –Ī—É–ī–Ķ—ā –ł–∑–ľ–Ķ–Ĺ–ł—ā—Ć –Ķ–≥–ĺ –ĺ—Ā–Ĺ–ĺ–≤—č–≤–į—Ź—Ā—Ć –Ĺ–į —ā–Ķ–ľ–Ņ–Ķ—Ä–į—ā—É—Ä–Ķ –ľ–ĺ—ā–ĺ—Ä–ĺ–≤(–Ĺ–Ķ –ī–ĺ–Ľ–∂–Ĺ–į –Ņ—Ä–Ķ–≤—č—ą–į—ā—Ć 75-80–≥—Ä–į–ī).
–ė –Ķ—Č–Ķ — –ľ–ĺ—ā–ĺ—Ä—č, –ī–į–∂–Ķ –≤ —Ä–Ķ–∂–ł–ľ–Ķ —É–ī–Ķ—Ä–∂–į–Ĺ–ł—Ź —ą–į–≥–į,(–ļ–ĺ–≥–ī–į –≤—Ā–Ķ –Ņ–ĺ–ī–ļ–Ľ—é—á–Ķ–Ĺ–ĺ –ł, –Ĺ–į–Ņ—Ä–ł–ľ–Ķ—Ä, —Ā—ā–ĺ–ł—ā –≤ –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł–ł 0,0) —ā–ĺ–∂–Ķ –Ĺ–į–≥—Ä–Ķ–≤–į—é—ā—Ā—Ź.
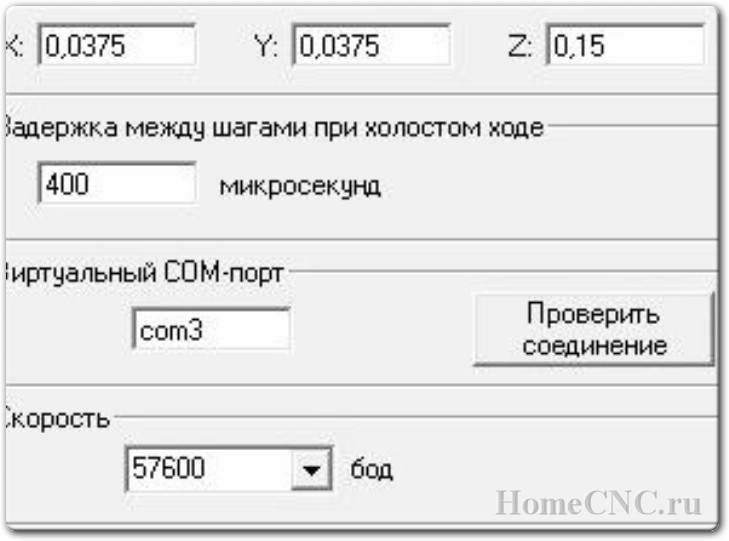
–í –Ņ—Ä–ĺ–≥—Ä–į–ľ–ľ–Ķ —É—Ā—ā–į–Ĺ–į–≤–Ľ–ł–≤–į–Ķ–ľ –Ņ–į—Ä–į–ľ–Ķ—ā—Ä «–∑–į–ī–Ķ—Ä–∂–ļ–į –ľ–Ķ–∂–ī—É —ą–į–≥–į–ľ–ł –Ņ—Ä–ł —Ö–ĺ–Ľ–ĺ—Ā—ā–ĺ–ľ —Ö–ĺ–ī–Ķ» –ľ–Ķ—ā–ĺ–ī–ĺ–ľ –Ņ—Ä–ĺ–Ī(–í —Ä–Ķ–∂–ł–ľ–Ķ —Ä—É—á–Ĺ–ĺ–≥–ĺ —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź, –ī–ĺ–Ī–ł–≤–į–Ķ–ľ—Ā—Ź –ľ–ł–Ĺ–ł–ľ–į–Ľ—Ć–Ĺ—č—Ö –∑–Ĺ–į—á–Ķ–Ĺ–ł–Ļ —ć—ā–ĺ–≥–ĺ –Ņ–į—Ä–į–ľ–Ķ—ā—Ä–į, –Ņ—Ä–ł –ļ–ĺ—ā–ĺ—Ä–ĺ–ľ –ĺ—ā—Ā—É—ā—Ā—ā–≤—É—é—ā –Ņ—Ä–ĺ–Ņ—É—Ā–ļ–ł —ą–į–≥–į), —Ź —É—Ā—ā–į–Ĺ–ĺ–≤–ł–Ľ 400 –ľ–ł–ļ—Ä–ĺ—Ā–Ķ–ļ—É–Ĺ–ī( –≤ –≤–į—ą–Ķ–ľ —Ā–Ľ—É—á–į–Ķ –ľ–ĺ–∂–Ķ—ā –Ī—č—ā—Ć –ī—Ä—É–≥–ĺ–Ķ –ł —ć—ā–ĺ –∑–Ĺ–į—á–Ķ–Ĺ–ł–Ķ –Ĺ—É–∂–Ĺ–ĺ –Ņ—Ä–į–≤–ł—ā—Ć –ł –≤ —Ā–ļ–Ķ—ā—á–Ķ –Ņ–Ķ—Ä–Ķ–ī –∑–į–Ľ–ł–≤–ļ–ĺ–Ļ –≤ –Ĺ–į–Ĺ–ļ—É).
–ó–Ĺ–į—á–Ķ–Ĺ–ł–Ķ —Ā–ļ–ĺ—Ä–ĺ—Ā—ā–ł –Ņ–ĺ—Ä—ā–į –ł –≤ –Ņ—Ä–ĺ–≥—Ä–į–ľ–ľ–Ķ –ł –≤ —Ā–ļ–Ķ—ā—á–Ķ —Ā—ā–į–≤–ł–ľ –ĺ–ī–ł–Ĺ–į–ļ–ĺ–≤–ĺ–Ķ.
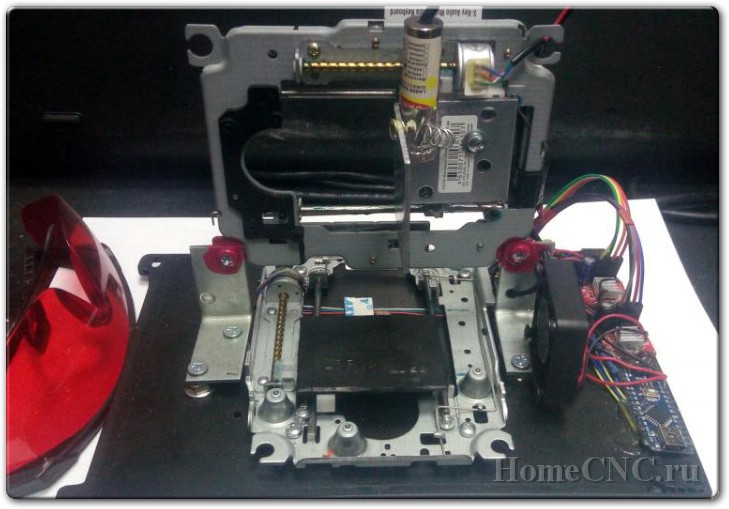
–°—ā–į–Ĺ–ĺ–ļ –≤ —Ā–Ī–ĺ—Ä–Ķ –ł –≥–ĺ—ā–ĺ–≤ –ļ —Ä–į–Ī–ĺ—ā–Ķ:
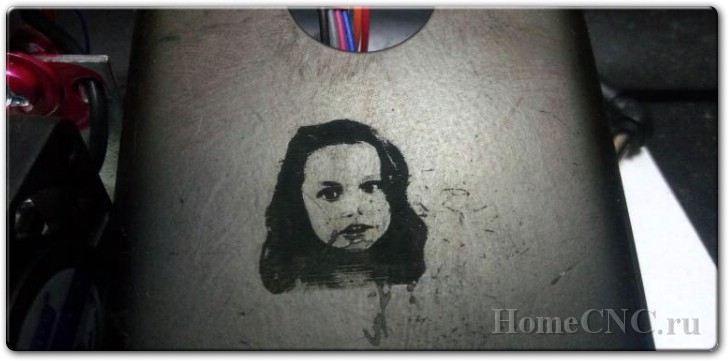
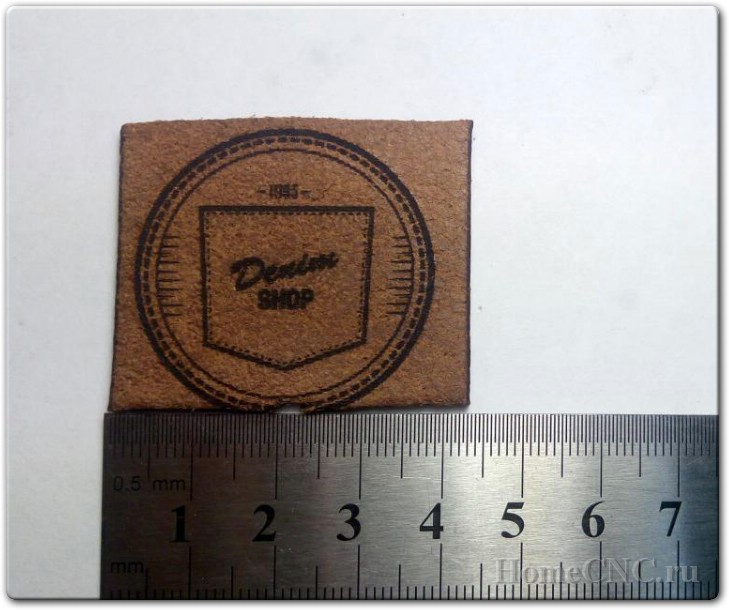
–í–ł–ī–Ķ–ĺ —Ä–į–Ī–ĺ—ā—č —Ā—ā–į–Ĺ–ļ–į(–Ě–į—Ā—ā—Ä–ĺ–Ļ–ļ–ł –≤ –Ņ—Ä–ĺ–≥—Ä–į–ľ–ľ–Ķ –Ņ–Ķ—Ä–Ķ–ī –Ĺ–Ķ–Ņ–ĺ—Ā—Ä–Ķ–ī—Ā—ā–≤–Ķ–Ĺ–Ĺ—č–ľ —Ā—ā–į—Ä—ā–ĺ–ľ –≤–ł–ī–Ĺ—č. –í –≥–Ľ–į–≤–Ĺ–ĺ–ľ –ĺ–ļ–Ĺ–Ķ –Ņ—Ä–ĺ–≥—Ä–į–ľ–ľ—č->–õ–į–∑–Ķ—Ä–Ĺ–į—Ź –≥—Ä–į–≤–ł—Ä–ĺ–≤–ļ–į-> –ď—Ä–į–ī–į—Ü–ł–ł/–ö–į—Ä—ā–ł–Ĺ—č. –ü–ĺ–Ľ–Ĺ–ĺ–Ķ –≤—Ä–Ķ–ľ—Ź –≤—č–∂–ł–≥–į–Ĺ–ł—Ź — ~5–ľ–ł–Ĺ—É—ā. –†–į–∑–ľ–Ķ—Ä –Ņ–ĺ–Ľ—É—á–ł–≤—ą–Ķ–≥–ĺ—Ā—Ź –ł–∑–ĺ–Ī—Ä–į–∂–Ķ–Ĺ–ł—Ź 3,5—Ā–ľ –≤ –ī–ł–į–ľ–Ķ—ā—Ä–Ķ. –ē—Ā–Ľ–ł –Ī—č —Ź —É–ľ–Ķ–Ĺ—Ć—ą–ł–Ľ –≤—Ä–Ķ–ľ—Ź –∑–į–ī–Ķ—Ä–∂–ļ–ł —Ā 11000 –Ĺ–į, –Ĺ–į–Ņ—Ä–ł–ľ–Ķ—Ä, 5000, —ā–ĺ —Ā–ī–Ķ–Ľ–į–Ľ–ĺ—Ā—Ć –Ī—č –Ī—č—Ā—ā—Ä–Ķ–Ķ.):
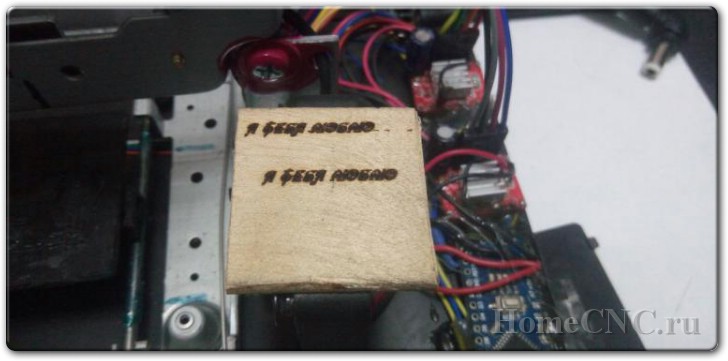
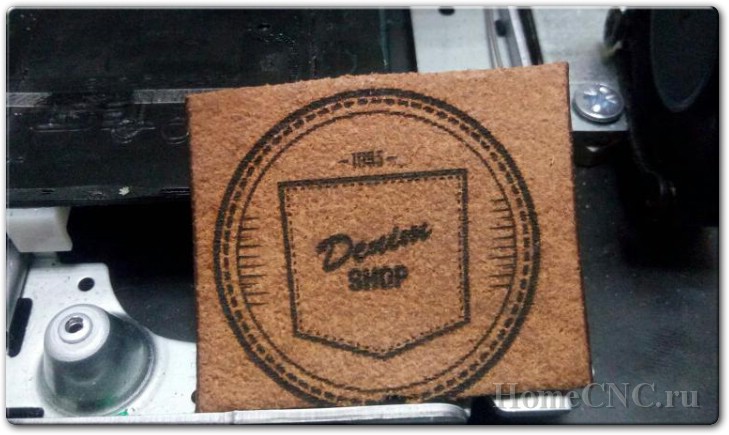
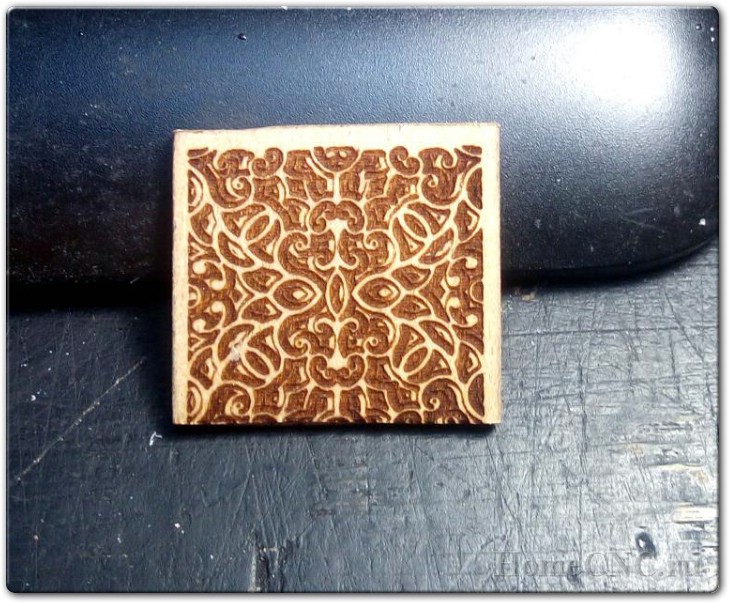
–§–ĺ—ā–ĺ –Ņ—Ä–ĺ–Ī–Ĺ–ł–ļ–ĺ–≤(–õ–ł—Ü–ĺ(—Ä–į–Ĺ–ī–ĺ–ľ–Ĺ–ĺ–Ķ –ł–∑ —Ā–Ķ—ā–ł) –≥—Ä–į–≤–ł—Ä–ĺ–≤–į–Ľ–ĺ—Ā—Ć –Ĺ–į —É–∂–Ķ –ĺ–Ī—ą–į—Ä–Ņ–į–Ĺ–Ĺ—É—é –Ņ–ĺ–≤–Ķ—Ä—Ö–Ĺ–ĺ—Ā—ā—Ć(–ī—Ä—É–≥–ĺ–≥–ĺ –ľ–į—ā–Ķ—Ä–ł–į–Ľ–į –≤ –Ĺ–į–Ľ–ł—á–ł–ł –Ĺ–Ķ –ĺ–ļ–į–∑–į–Ľ–ĺ—Ā—Ć). –®—Ä–ł—Ą—ā, –≤ –Ņ—Ä–ł–ľ–Ķ—Ä–Ķ —Ā —ā–Ķ–ļ—Ā—ā–ĺ–ľ, —Ź –≤—č–Ī—Ä–į–Ľ –Ĺ–Ķ –ĺ—á–Ķ–Ĺ—Ć —É–ī–į—á–Ĺ—č–Ļ. –†–ł—Ā—É–Ĺ–ĺ–ļ –Ĺ–į –ļ–ĺ–∂–Ķ –ľ–ĺ–≥ –Ī—č –Ī—č—ā—Ć —á–Ķ—ā—á–Ķ, –Ĺ–ĺ —Ā—ā—Ä—É–ļ—ā—É—Ä–į –ļ–ĺ–∂–ł –ĺ–ļ–į–∑–į–Ľ–į—Ā—Ć –ļ—Ä—É–Ņ–Ĺ–ĺ—Ą–į–ļ—ā—É—Ä–Ĺ–į—Ź. –ě—Ä–Ĺ–į–ľ–Ķ–Ĺ—ā –ĺ—ā–ľ—č—ā –Ņ–ĺ–ī –≤–ĺ–ī–ĺ–Ļ –ĺ—ā —Ā–į–∂–ł, –≤—č–∂–ł–≥–į–Ĺ–ł–Ķ –∑–į–Ĺ—Ź–Ľ–ĺ –ĺ–ļ–ĺ–Ľ–ĺ 30 –ľ–ł–Ĺ—É—ā):
–§–ĺ—ā–ĺ –Ņ—Ä–ĺ–Ī–Ĺ–ł–ļ–ĺ–≤
–°–ö–ē–Ę–ß
int motorPins[3][2] = {{8,9},{10,11},{12, 13}};
int count; //–Ņ–ĺ–ī–ļ–Ľ—é—á–Ķ–Ĺ–ł–Ķ –Ņ–Ķ—Ä–≤–ĺ–≥–ĺ –ľ–ĺ—ā–ĺ—Ä–į
int count2[3] = {0,0,0}; //–Ņ–ł–Ĺ STEP –Ĺ–į –Ņ–ł–Ĺ –į—Ä–ī—É–ł–Ĺ—č D8
int delayTime = 150; //–Ņ–ł–Ĺ DIR –Ĺ–į –Ņ–ł–Ĺ –į—Ä–ī—É–ł–Ĺ—č D9
int val = 0;
int rot=0; //–Ņ–ĺ–ī–ļ–Ľ—é—á–Ķ–Ĺ–ł–Ķ –≤—ā–ĺ—Ä–ĺ–≥–ĺ –ľ–ĺ—ā–ĺ—Ä–į
int incomingByte = 0; //–Ņ–ł–Ĺ STEP –Ĺ–į –Ņ–ł–Ĺ –į—Ä–ī—É–ł–Ĺ—č D10
int sign=1; //–Ņ–ł–Ĺ DIR –Ĺ–į –Ņ–ł–Ĺ –į—Ä–ī—É–ł–Ĺ—č D11
int s_p=40;
void setup() { //–õ–į–∑–Ķ—Ä –Ņ–ĺ–ī–ļ–Ľ—é—á–į–Ķ—ā—Ā—Ź –Ĺ–į –Ņ–ł–Ĺ D2
int i;
Serial.begin(57600); //–≠—ā–į —Ā–ļ–ĺ—Ä–ĺ—Ā—ā—Ć –ī–ĺ–Ľ–∂–Ĺ–į —Ā–ĺ–≤–Ņ–į–ī–į—ā—Ć —Ā–ĺ —Ā–ļ–ĺ—Ä–ĺ—Ā—ā—Ć—é –≤ –Ņ—Ä–ĺ–≥—Ä–į–ľ–ľ–Ķ
pinMode(2, OUTPUT);
for (i=0; i<3; i++) {
for (count = 0; count < 2; count++) {
pinMode(motorPins[i][count], OUTPUT);}} //—É—Ā—ā–į–Ĺ–ĺ–≤–ļ–į —Ä–Ķ–∂–ł–ľ–į —Ä–į–Ī–ĺ—ā—č —Ü–ł—Ą—Ä–ĺ–≤—č—Ö pin'–ĺ–≤ –ź—Ä–ī—É–ł–Ĺ–ĺ
delayTime=400;} //–∑–į–ī–Ķ—Ä–∂–ļ–į –ľ–Ķ–∂–ī—É —ą–į–≥–į–ľ–ł –Ņ–ĺ —É–ľ–ĺ–Ľ—á–į–Ĺ–ł—é
void moveForward(int sm) {
digitalWrite(motorPins[sm][1], HIGH);
digitalWrite(motorPins[sm][0], HIGH);
digitalWrite(motorPins[sm][0], LOW);}
void moveBackward(int sm) {
digitalWrite(motorPins[sm][1], LOW);
digitalWrite(motorPins[sm][0], HIGH);
digitalWrite(motorPins[sm][0], LOW);}
void delayMicros(long wt){
unsigned long mls;
unsigned int mks;
mls=(unsigned long)(wt / 1000);
mks=(unsigned int)(wt % 1000);
if (mls>0) delay(mls);
if (mks>0) delayMicroseconds(mks);}
void MoveSM(long x, long y, long z) {
long c[3], c2[3];
double c1[3], d[3];
long m, i;
boolean flg;
long ms;
long d1, d2, d3, d4, t, dt;
c[0] = x;
c[1] = y;
c[2] = z;
m = 1;
for (i=0; i<2; i++) {
if (m < abs(c[i])) m = abs(c[i]);}
for (i=0; i<2; i++) {
c1[i] = 0;
d[i] = 1.0 * c[i] / m;
c2[i] = 0;}
flg = false;
for (i=0; i<2; i++) {
if (abs(c1[i]) < abs(c[i])) flg=true;}
t=m;
if (z>0 && t>0) {
if (z>=delayTime) {
dt=z; d1=s_p; d2=1;
d3=0;
if (d1==d2) d4=z/2; else d4=z;
} else {
dt=delayTime;
d3=dt*s_p*(dt-z)/dt/2;
d2=d3/dt;
d1=s_p-d2;
d3=d3-d2*dt;
d2=d2+1;
if (d1==d2) d4=dt/2-d3; else d4=dt-d3;}
} else {
dt=delayTime;
d1=-1; d2=-1; d3=0; d4=0;}
while (flg) {
flg=false;
for (i=0; i<2; i++) {
if (abs(c1[i]) < abs(c[i]))
c1[i] += d[i];
if (abs(c1[i]) - abs(c2[i]) >= 0.5) {
if (c[i]>0) {
c2[i]++;
moveForward(i);
} else if (c[i]<0) {
c2[i]--;
moveBackward(i);}}
if (abs(c1[i]) < abs(c[i])) flg=true;}
if (z>0) {
if (t==d1) {
delayMicros(d3);
digitalWrite(2, HIGH);
delayMicros(d4);}
if (t==d2) {
delayMicros(d4);
digitalWrite(2, LOW);
delayMicros(d3);}
if (t!=d1 && t!=d2) {
delayMicros(dt);}
} else {
delayMicros(dt);}
t--;}}
void loop() {
if (Serial.available() > 0) {
long c[5]={0,0,0,0,0};
int i;
sign=1;
i=0;
incomingByte = Serial.read();
while (incomingByte!=';') {
if (c[i]==0) {
if (incomingByte=='-')
sign=-1;}
if (incomingByte==',') {
c[i]*=sign;
sign=1;
i++;
} else if (incomingByte>='0' && incomingByte<='9') {
c[i]=c[i]*10+incomingByte-'0';}
while (Serial.available() == 0) {
delayMicroseconds(1);}
incomingByte = Serial.read();}
c[i]*=sign;
if (c[3]>0) s_p=c[3];
if (c[4]>0) delayTime=c[4];
MoveSM(c[0],c[1],c[2]);
Serial.println("OK");}
else
delayMicroseconds(1); }
–ė—ā–ĺ–≥: –ö—Ä–į–Ļ–Ĺ–Ķ —Ā–ĺ–≤–Ķ—ā—É—é –ļ–į–∂–ī–ĺ–ľ—É, –ļ—ā–ĺ –ī—É–ľ–į–Ķ—ā —Ā–ĺ–Ī—Ä–į—ā—Ć —Ā–≤–ĺ–Ļ –Ņ–Ķ—Ä–≤—č–Ļ —Ā—ā–į–Ĺ–ĺ–ļ –ß–ü–£ –Ĺ–į –Ľ–į–∑–Ķ—Ä–Ķ, –ł –ī—É–ľ–į–Ķ—ā –Ĺ–į—á–į—ā—Ć —Ā –Ī–ĺ–Ľ—Ć—ą–ĺ–≥–ĺ –ł –ľ–ĺ—Č–Ĺ–ĺ–≥–ĺ, —Ā–Ĺ–į—á–į–Ľ–į –Ņ–ĺ–Ņ—Ä–ĺ–Ī–ĺ–≤–į—ā—Ć —Ā–ĺ–Ī—Ä–į—ā—Ć —ć—ā–ĺ—ā.
–Ē–į–Ķ—ā –ļ—É—á—É –ĺ–Ņ—č—ā–į –ł –Ņ–ĺ–Ĺ–ł–ľ–į–Ĺ–ł—Ź –ľ–Ķ—Ö–į–Ĺ–ł–∑–ľ–ĺ–≤.
–ē—Ā–Ľ–ł –Ķ—Ā—ā—Ć –≤–ĺ–Ņ—Ä–ĺ—Ā—č, –Ņ–ĺ –≤–ĺ–∑–ľ–ĺ–∂–Ĺ–ĺ—Ā—ā–ł –ĺ—ā–≤–Ķ—á—É –≤ –ļ–ĺ–ľ–ľ–Ķ–Ĺ—ā–į—Ä–ł—Ź—Ö.
–į–≤—ā–ĺ—Ä: Arthurios |