3D –њ—А–Є–љ—В–µ—А —Б–≤–Њ–Є–Љ–Є —А—Г–Ї–∞–Љ–Є –љ–∞ —И–∞–≥–Њ–≤–Є–Ї–∞ –Њ—В –Љ–∞—А—В–Є—З–љ–Њ–≥–Њ –њ—А–Є–љ—В–µ—А–∞

–Т—Б–µ–Љ –і–Њ–±—А–Њ–≥–Њ –≤—А–µ–Љ–µ–љ–Є —Б—Г—В–Њ–Ї! –Т –Ї–Њ–Љ–Љ–µ–љ—В–∞—А–Є—П—Е –њ–Њ–Њ–±–µ—Й–∞–ї —Б–і–µ–ї–∞—В—М –Њ–±–Ј–Њ—А –љ–∞ —Б–≤–Њ–є 3D –њ—А–Є–љ—В–µ—А c –Ї–Є–љ–µ–Љ–∞—В–Є–Ї–Њ–є CoreXY –љ–∞ —И–∞–≥–Њ–≤–Є–Ї–∞—Е –Њ—В –Љ–∞—В—А–Є—З–љ–Њ–≥–Њ –њ—А–Є–љ—В–µ—А–∞. –Ъ–Њ–Љ—Г –Є–љ—В–µ—А–µ—Б–љ–Њ, –њ—А–Њ—И—Г –њ–Њ–ґ–∞–ї–Њ–≤–∞—В—М –њ–Њ–і –Ї–∞—В.
–Ф–ї—П –љ–∞—З–∞–ї–∞ –љ–µ–Љ–љ–Њ–≥–Њ –њ—А–µ–і—Л—Б—В–Њ—А–Є–Є –њ–Њ—П–≤–ї–µ–љ–Є—П –і–∞–љ–љ–Њ–є –њ–Њ–і–µ–ї–Ї–Є:
–У–Њ–і–∞ —В—А–Є –љ–∞–Ј–∞–і –і–Њ—Б—В–∞–ї–Є—Б—М –Љ–љ–µ –Ј–∞–±–µ—Б–њ–ї–∞—В–љ–Њ —З–µ—В—Л—А–µ –Ї–Њ–Љ–њ–ї–µ–Ї—В–∞ —И–∞–≥–Њ–≤—Л—Е –і–≤–Є–≥–∞—В–µ–ї–µ–є –Њ—В –њ—А–Є–љ—В–µ—А–∞ Epson FX890. –Т –љ–µ–Љ –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –і–≤–∞ —И–∞–≥–Њ–≤—Л—Е –і–≤–Є–≥–∞—В–µ–ї—П, –љ–∞—Б –Є–љ—В–µ—А–µ—Б—Г–µ—В EM-336 (–Њ–љ –ґ–µ STP42D-221-03) –Њ—В Shinano Kenshi. –Т–∞–ї—П–ї–Є—Б—М –±—Л —Н—В–Є –і–≤–Є–≥–∞—В–µ–ї–Є –і–Њ –≤—В–Њ—А–Њ–≥–Њ –њ—А–Є—И–µ—Б—В–≤–Є—П, –µ—Б–ї–Є –±—Л –Ј–і–µ—Б—М –љ–µ –њ–Њ—П–≤–Є–ї—Б—П –Њ–±–Ј–Њ—А –Њ—В –Ј–µ–Љ–ї—П–Ї–∞ smirnov (–Ј–∞ —З—В–Њ –µ–Љ—Г –±–Њ–ї—М—И–Њ–µ —Б–њ–∞—Б–Є–±–Њ).
–Ґ–∞–Ї –≤–Њ—В, –њ–Њ—Б–ї–µ –њ—А–Њ—З—В–µ–љ–Є—П —А—Г–Ї–Є –Ј–∞—З–µ—Б–∞–ї–Є—Б—М, –Є –≤ —А–µ–Ј—Г–ї—М—В–∞—В–µ —Н—В–Њ–є —З–µ—Б–Њ—В–Ї–Є, –≥–Њ–і–∞ –і–≤–∞ –љ–∞–Ј–∞–і, —А–Њ–і–Є–ї–Њ—Б—М –њ–Њ–і–µ–ї–Є–µ –≤ –≤–Є–і–µ –Я—А—О—И–Є i3 –љ–∞ –∞–Ї—А–Є–ї–Њ–≤–Њ–є —А–∞–Љ–µ, —Б –±–Њ—Г–і–µ–љ –њ–Њ–і–∞—З–µ–є –Є ATX –±–ї–Њ–Ї–Њ–Љ –њ–Є—В–∞–љ–Є—П. –Ф–∞–±—Л –љ–µ –Є—Б–њ—Г–≥–∞—В—М —З–Є—В–∞—В–µ–ї–µ–є, —А–∞–Ј–Љ–µ—Й—Г —Д–Њ—В–Њ –њ–Њ–і —Б–њ–Њ–є–ї–µ—А.
Prusa i3
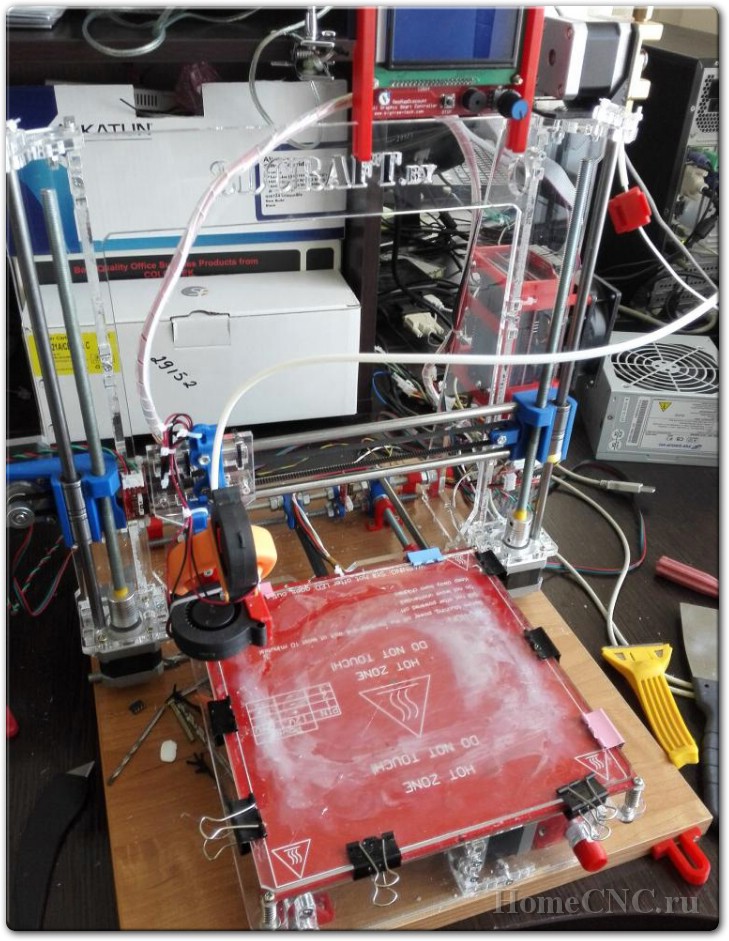
–Ч–∞ –±–∞—А–і–∞–Ї –љ–∞ —Б—В–Њ–ї–µ –њ—А–Њ—И—Г –њ—А–Њ—Й–µ–љ–Є—П, –њ—А–Є–љ—В–µ—А —Б–Њ–±–Є—А–∞–ї—Б—П –Є —Б—В–Њ–Є—В –љ–∞ —А–∞–±–Њ—В–µ
–Я–Њ—Б–ї–µ —Б–±–Њ—А–Ї–Є –Є –љ–∞—Б—В—А–Њ–є–Ї–Є –њ—А—О—И–Є –Њ—Б—В–∞–ї–Є—Б—М –і–≤–∞ —И–∞–≥–Њ–≤–Є–Ї–∞, –Ј–∞—В–µ–Љ –Ї –љ–Є–Љ –і–Њ–±–∞–≤–Є–ї–∞—Б—М –µ—Й–µ –њ–∞—А–∞ –Є —А—Г–Ї–Є –Ј–∞—З–µ—Б–∞–ї–Є—Б—М –µ—Й–µ —Б–Є–ї—М–љ–µ–µ.
–Ю–і–љ–∞–ґ–і—Л –њ—А–Є —З—В–µ–љ–Є–Є —В—Г–і–µ–є–Ї–Є –љ–∞—В–Ї–љ—Г–ї—Б—П –љ–∞ –њ—А–Њ–µ–Ї—В –Є –≤—Б–µ –≤—Б—В–∞–ї–Њ –љ–∞ —Б–≤–Њ–Є –Љ–µ—Б—В–∞ — –њ—А–Є–љ—В–µ—А –і–ї—П –њ–µ—З–∞—В–Є –і–µ—В–∞–ї–µ–є –±—Л–ї, –Њ–њ—Л—В –њ–Њ —Б–±–Њ—А–Ї–µ —В–Њ–ґ–µ, —И–∞–≥–Њ–≤–Є–Ї–Є –Є –Ї–Њ–µ –Ї–∞–Ї–Є–µ –Ј–∞–њ—З–∞—Б—В–Є — –≤ –љ–∞–ї–Є—З–Є–Є, –љ—Г –Є –±—А–∞—В—М—П –Ї–Є—В–∞–є—Ж—Л –≤ –њ–Њ–Љ–Њ—Й—М.
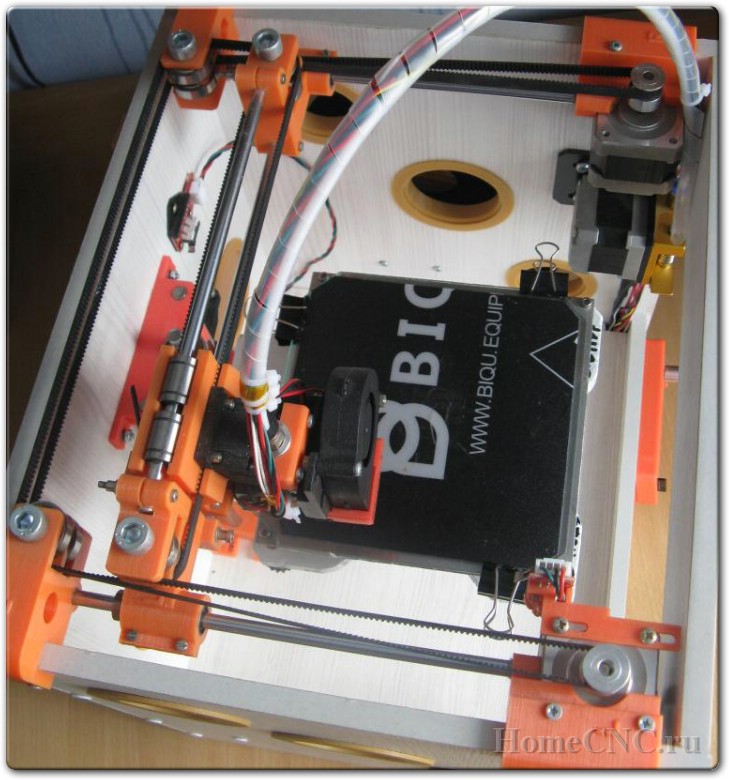
–Т —А–µ–Ј—Г–ї—М—В–∞—В–µ –њ–Њ–ї—Г—З–Є–ї—Б—П –≤–Њ—В —В–∞–Ї–Њ–є –њ—А–Є–љ—В–µ—А:
–†–∞–Ј–Љ–µ—А—Л (–Т*–®*–У) — 38*32*27 —Б–Љ (–±–µ–Ј –Ї—А–µ–њ–ї–µ–љ–Є—П –Ї–∞—В—Г—И–Ї–Є)
–Ь–µ—Е–∞–љ–Є–Ї–∞:
–Ъ–Є–љ–µ–Љ–∞—В–Є–Ї–∞ — –°oreXY
–†–∞–Ј–Љ–µ—А—Л –Њ–±–ї–∞—Б—В–Є –њ–µ—З–∞—В–Є (X*Y*Z) — 124*130*105 –Љ–Љ
–†–∞–Ј–Љ–µ—А—Л –љ–∞–њ—А–∞–≤–ї—П—О—Й–Є—Е –Њ—Б–µ–є X, Y — –і–Є–∞–Љ–µ—В—А 6 –Љ–Љ, –і–ї–Є–љ–∞ 200 –Љ–Љ
–Ш—Б–њ–Њ–ї—М–Ј—Г—О—В—Б—П —И–њ—Г–ї–Є GT2-20, —А–µ–Љ–µ–љ—М GT2 —И–Є—А–Є–љ–∞ 6 –Љ–Љ
–Ю—Б—М Z — –і–Є–∞–Љ–µ—В—А 8 –Љ–Љ, –і–ї–Є–љ–∞ 220 –Љ–Љ, –њ–µ—А–µ–Љ–µ—Й–∞–µ—В—Б—П –≤–Є–љ—В–Њ–≤–Њ–є —И–њ–Є–ї—М–Ї–Њ–є –Ь8.
–≠–Ї—Б—В—А—Г–і–µ—А — –±–Њ—Г–і—Н–љ MK8
–•–Њ—В—Н–љ–і — –Ї–Є—В–∞–є—Б–Ї–Є–є E3D V6, –њ–Њ–і 1,75 —Д–Є–ї–∞–Љ–µ–љ—В.
–≠–ї–µ–Ї—В—А–Њ–љ–Є–Ї–∞:
–С–ї–Њ–Ї –њ–Є—В–∞–љ–Є—П 12–Т 10 –Р (–Ї–Є—В–∞–є—Б–Ї–Є—Е)
Arduino Mega 2560, RAMPS 1.4, MKS Mini 12864LCD
–Ф—А–∞–є–≤–µ—А–∞ — 2*TMC2208 (–Њ—Б—М X,Y), 2*A4988 (–Њ—Б—М Z, —Н–Ї—Б—В—А—Г–і–µ—А)
–Ъ–Њ–љ—Ж–µ–≤–Є–Ї–Є –Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї–Є–µ.
–°–Њ—Д—В:
–њ—А–Њ—И–Є–≤–Ї–∞ — Marlin 1.1.5
—Б–ї–∞–є—Б–µ—А — Simplify3D 4.0.1

–Ф–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л–µ —Д–Њ—В–Њ
–Ґ–µ–њ–µ—А—М —Б–Њ–±—Б—В–≤–µ–љ–љ–Њ –Ї–∞–Ї —Н—В–Њ —Б–Њ–±–Є—А–∞–ї–Њ—Б—М, –Ї–∞–Ї–Є–µ –±—Л–ї–Є —В—А—Г–і–љ–Њ—Б—В–Є –Є –Ї–∞–Ї –Њ–љ–Є –њ—А–µ–Њ–і–Њ–ї–µ–≤–∞–ї–Є—Б—М.
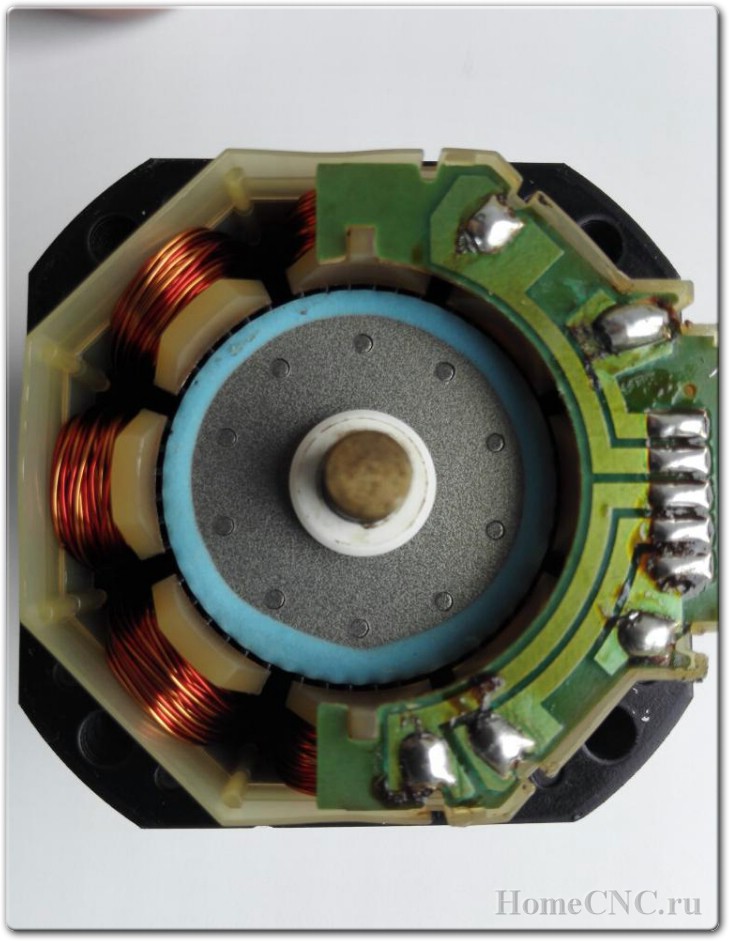
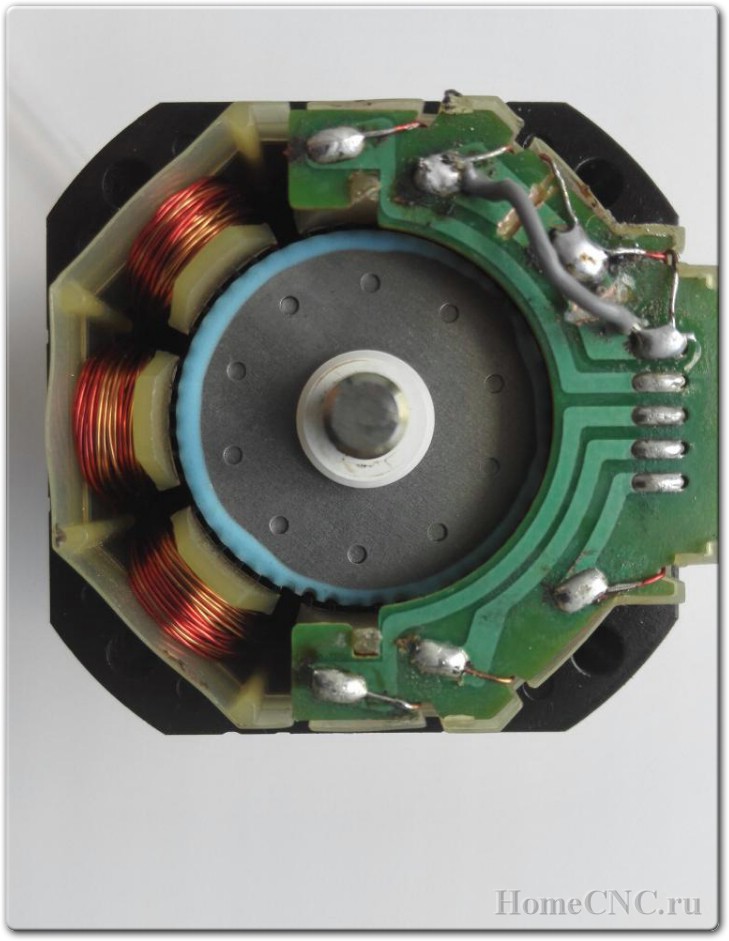
–Ф–ї—П –љ–∞—З–∞–ї–∞, —В—А–µ–±—Г–µ—В—Б—П –њ–µ—А–µ–і–µ–ї–∞—В—М —И–∞–≥–Њ–≤—Л–є –і–≤–Є–≥–∞—В–µ–ї—М EM-336 –Є–Ј —Г–љ–Є–њ–Њ–ї—П—А–љ–Њ–≥–Њ –≤ –±–Є–њ–Њ–ї—П—А–љ—Л–є, —Б–љ—П—В—М —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ—Г—О —И–њ—Г–ї—О (–Љ–љ–µ –±—А–∞—В –љ–∞ –њ—А–µ—Б—Б–µ –≤—Л–њ—А–µ—Б—Б–Њ–≤–∞–ї, –љ–Њ –Љ–Њ–ґ–љ–Њ –Є –±–Њ–ї–≥–∞—А–Ї–Њ–є –њ–Њ–њ—А–Њ–±–Њ–≤–∞—В—М).
–Ъ–Њ—А–њ—Г—Б
–Ф–ї—П —А–∞—Б—З–µ—В–∞ –Ї–Њ—А–њ—Г—Б–∞ –Є –і–µ—В–∞–ї–µ–є –њ–Њ–і –љ—Г–ґ–љ—Л–µ –Ї–Њ–Љ–њ–ї–µ–Ї—В—Г—О—Й–Є–µ (—В–Њ–ї—Й–Є–љ–∞ –Є –і–ї–Є–љ–∞ –≤–∞–ї–Њ–≤, —А–∞–Ј–Љ–µ—А—Л –Њ–±–ї–∞—Б—В–Є –њ–µ—З–∞—В–Є, —Б–њ–Њ—Б–Њ–± –њ–µ—А–µ–Љ–µ—Й–µ–љ–Є—П –Њ—Б–Є Z — –љ–∞ –≤–Є–љ—В–Њ–≤–Њ–є —И–њ–Є–ї—М–Ї–µ –Є–ї–Є –љ–∞ —А–µ–Љ–љ–µ) –Є–і–µ–Љ –љ–∞ , —В–∞–Љ –Њ–њ–Є—Б–∞–љ–Њ –Ї–∞–Ї–Є–µ –Ї–Њ–Љ–њ–ї–µ–Ї—В—Г—О—Й–Є–µ —В—А–µ–±—Г—О—В—Б—П –Є –≤ —А–∞–Ј–і–µ–ї–µ Documents —Б–Ї—А–Є–њ—В—Л –і–ї—П . –ѓ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї v.1.2 –і–ї—П —А–∞—Б—З–µ—В–∞ –Ї–Њ—А–њ—Г—Б–∞ –Є –і–µ—В–∞–ї–µ–є (–Ї—А–Њ–Љ–µ –Њ—Б–Є Z, —В.–Ї. –≤ —Н—В–Њ–є –≤–µ—А—Б–Є–Є —Б–Ї—А–Є–њ—В–∞ –љ–µ—В –Њ–њ—Ж–Є–Є –і–ї—П —А–∞—Б—З–µ—В–∞ –Њ—Б–Є –љ–∞ —И–њ–Є–ї—М–Ї–µ) –Є v.1.0.2 –і–ї—П —А–∞—Б—З–µ—В–∞ –і–µ—В–∞–ї–µ–є –Њ—Б–Є Z.(–Э–∞ –і–∞–љ–љ—Л–є –Љ–Њ–Љ–µ–љ—В –љ–∞ YouMagine —З—В–Њ-—В–Њ –њ–Њ–ї–Њ–Љ–∞–ї–Њ—Б—М –Є —Б–Ї—А–Є–њ—В—Л –љ–µ –Њ—В–Ї—А—Л–≤–∞—О—В—Б—П. –Ф–ї—П –Њ—В–Ї—А—Л—В–Є—П –Љ–Њ–ґ–љ–Њ —Б–Њ—Е—А–∞–љ–Є—В—М —Б–Ї—А–Є–њ—В—Л –љ–∞ –і–Є—Б–Ї, –Ј–∞–є—В–Є –љ–∞ openjscad.org –Є –Ј–∞–≥—А—Г–Ј–Є—В—М —Б–Ї—А–Є–њ—В, —Б–Њ—Е—А–∞–љ–µ–љ–љ—Л–є –љ–∞ –і–Є—Б–Ї–µ). –Я–Њ—Б–ї–µ —А–∞—Б—З–µ—В–∞ –і–µ—В–∞–ї–Є —Б–Њ—Е—А–∞–љ—П—О—В—Б—П –≤ stl –Њ–і–љ–Є–Љ —Д–∞–є–ї–Њ–Љ –Є –њ—А–Є—И–ї–Њ—Б—М –њ–µ—А–µ—Б–Њ—Е—А–∞–љ—П—В—М —В—А–µ–±—Г–µ–Љ—Л–µ –і–µ—В–∞–ї–Є –≤ —А–∞–Ј–љ—Л–µ —Д–∞–є–ї—Л.
–†–∞–Ј–Љ–µ—А—Л –Ї–Њ—А–њ—Г—Б–∞ —Г–ґ–µ —Б—З–Є—В–∞–ї —Б–∞–Љ (–і–ї—П –±–Њ–Ї–Њ–≤—Л—Е —Б—В–µ–љ–Њ–Ї, —В–∞–Љ –≥–і–µ –љ–∞—Е–Њ–і—П—В—Б—П –Ї—А–µ–њ–ї–µ–љ–Є—П –Њ—Б–Є Y, –ї—Г—З—И–µ –њ—А–Є–±–∞–≤–Є—В—М –њ–∞—А—Г —Б–∞–љ—В–Є–Љ–µ—В—А–Њ–≤ –Ї —А–∞—Б—З–µ—В–љ—Л–Љ), –њ–Њ–і —Б–≤–Њ—О –Ї–Њ–Љ–њ–Њ–љ–Њ–≤–Ї—Г, –Ј–∞—В–µ–Љ –Ј–∞–Ї–∞–Ј–∞–ї —А–∞—Б–њ–Є–ї–Њ–≤–Ї—Г —Б –Њ–Ї–ї–µ–є–Ї–Њ–є –Ї—А–Њ–Љ–Њ–Ї –Є–Ј –Ь–Ф–§ —В–Њ–ї—Й–Є–љ–Њ–є 10 –Љ–Љ –љ–∞ —А—Л–љ–Ї–µ —Г —В–Њ—А–≥–Њ–≤—Ж–µ–≤ –Ї—Г—Е–љ—П–Љ–Є. –Ю—З–µ–љ—М —Г–і–Є–≤–Є–ї—Б—П, –Ї–Њ–≥–і–∞ –Ј–∞–±–Є—А–∞–ї –Ј–∞–Ї–∞–Ј — —Б—В–Њ–Є–Љ–Њ—Б—В—М –Њ–Ї–∞–Ј–∞–ї–∞—Б—М 5$, —Б —Г—З–µ—В–Њ–Љ —В–Њ–≥–Њ, —З—В–Њ –∞–Ї—А–Є–ї–Њ–≤–∞—П —А–∞–Љ–∞ —Б –Ї—А–µ–њ–µ–ґ–Њ–Љ –Є —И–њ–Є–ї—М–Ї–∞–Љ–Є –Љ–љ–µ —Б—В–Њ–Є–ї–∞ 40$. –Ч–∞—В–µ–Љ —Б–∞–Љ —А–µ–Ј–∞–ї –љ–µ–Њ–±—Е–Њ–і–Є–Љ—Л–µ –Њ—В–≤–µ—А—Б—В–Є—П –Є –Њ–Ї–љ–∞ –Є —Б–Њ–±–Є—А–∞–ї –љ–∞ —Б–∞–Љ–Њ—А–µ–Ј—Л. –Ф–ї—П –Ї—А–∞—Б–Њ—В—Л –љ–∞–њ–µ—З–∞—В–∞–ї –±–µ–ї—Л—Е –Ј–∞–≥–ї—Г—И–µ–Ї –Є —В–µ—А–Љ–Њ–Ї–ї–µ–µ–Љ –њ—А–Є–Ї–ї–µ–Є–ї –љ–∞ —И–ї—П–њ–Ї–Є —Б–∞–Љ–Њ—А–µ–Ј–Њ–≤. –Ю —В–Њ–Љ –Њ—В–Ї—Г–і–∞ –њ–Њ—П–≤–Є–ї–∞—Б—М –Ї—Г—З–∞ –Ї—А—Г–≥–ї—Л—Е –Њ—В–≤–µ—А—Б—В–Є–є —А–∞—Б—Б–Ї–∞–ґ—Г –љ–Є–ґ–µ.
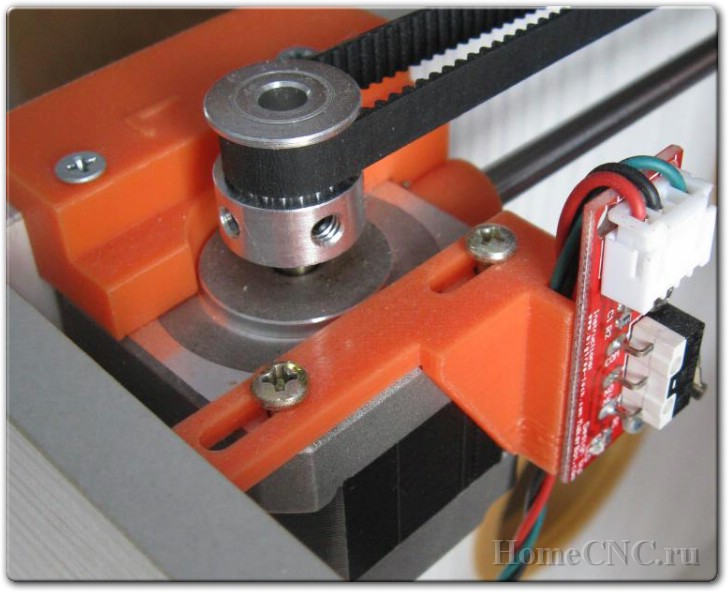
–Ю—Б–Є XY
–Я–Њ—Б–ї–µ —Б–±–Њ—А–Ї–Є –Ї–Њ—А–њ—Г—Б–∞ –њ—А–Є—И–µ–ї —З–µ—А–µ–і –њ–µ—З–∞—В–Є –і–µ—В–∞–ї–µ–є. –С–µ–Ј –њ–µ—А–µ–і–µ–ї–Ї–Є –Є–Ј–љ–∞—З–∞–ї—М–љ–Њ –љ–∞–њ–µ—З–∞—В–∞–ї 7 –і–µ—В–∞–ї–µ–є — –Ї–∞—А–µ—В–Ї–∞, –Ї—А–µ–њ–ї–µ–љ–Є—П –љ–∞–њ—А–∞–≤–ї—П—О—Й–Є—Е –Њ—Б–Є X, –і–∞–ї—М–љ–Є–µ –Ї—А–µ–њ–ї–µ–љ–Є—П –љ–∞–њ—А–∞–≤–ї—П—О—Й–Є—Е –Њ—Б–Є Y –Є –Ї—А–µ–њ–ї–µ–љ–Є—П —И–∞–≥–Њ–≤–Є–Ї–Њ–≤ (–Њ–љ–Є –ґ–µ –њ–µ—А–µ–і–љ–Є–µ –Ї—А–µ–њ–ї–µ–љ–Є—П –љ–∞–њ—А–∞–≤–ї—П—О—Й–Є—Е –Њ—Б–Є Y). –Т—Б–µ –і–µ—В–∞–ї–Є –њ–µ—З–∞—В–∞–ї –±–µ—Б—В—Д–Є–ї–∞–Љ–µ–љ—В–Њ–≤—Б–Ї–Є–Љ –њ–µ—А–µ—Е–Њ–і–љ—Л–Љ PLA —Б –Ј–∞–њ–Њ–ї–љ–µ–љ–Є–µ–Љ 50 –Є–ї–Є 60%.
–Я—А–Є —Б–±–Њ—А–Ї–µ –Њ—Б–Є Y –≤—Л–ї–µ–Ј –Ї–Њ—Б—П–Ї — –њ—А–Є –њ–Њ–њ—Л—В–Ї–µ –Ј–∞–Ї—А–µ–њ–Є—В—М –≤ –њ—А–∞–≤–Њ–Љ –њ–µ—А–µ–і–љ–µ–Љ –Ї—А–µ–њ–ї–µ–љ–Є–Є –љ–∞–њ—А–∞–≤–ї—П—О—Й—Г—О, —В—А–µ—Б–љ—Г–ї–Њ –њ–Њ—Б–∞–і–Њ—З–љ–Њ–µ –Љ–µ—Б—В–Њ –њ–Њ–і –љ–µ–µ. –Э–Њ —Б –ї–µ–≤–Њ–є —З–∞—Б—В—М—О –≤—Л—И–ї–Њ –µ—Й–µ —Е—Г–ґ–µ — –њ—А–Є –њ–µ—З–∞—В–Є –љ–µ —Г—З–µ–ї –Њ–і–љ–Њ–≥–Њ –≤–∞–ґ–љ–Њ–≥–Њ —Д–∞–Ї—В–∞ — —Г –њ—А–Є–љ—В–µ—А–љ—Л—Е —И–∞–≥–Њ–≤–Є–Ї–Њ–≤ –Є–Ј –Ї–Њ—А–њ—Г—Б–∞ —В–Њ—А—З–Є—В —В–Њ–ї—М–Ї–Њ 23 –Љ–Љ –Њ—Б–Є, –Є –≤ —Б–Є–ї—Г –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є–Є –ї–µ–≤–∞—П —И–њ—Г–ї—П –љ–∞—Е–Њ–і–Є—В—Б—П –≤—Л—И–µ —З–µ–Љ –њ—А–∞–≤–∞—П, –Є –њ–Њ–ї—Г—З–∞–ї–Њ—Б—М —З—В–Њ —Б –Њ—А–Є–≥–Є–љ–∞–ї—М–љ–Њ–є –і–µ—В–∞–ї—М—О –і–ї–Є–љ—Л –Њ—Б–Є —И–∞–≥–Њ–≤–Є–Ї–∞ –љ–µ —Е–≤–∞—В–∞–µ—В. –°—А–∞–Ј—Г –љ–∞—З–∞–ї —А–∞—Б—Б–Љ–∞—В—А–Є–≤–∞—В—М –≤–∞—А–Є–∞–љ—В—Л —Б —А–∞–Ј–љ—Л–Љ–Є –Ї–Њ—Б—В—Л–ї—П–Љ–Є, –љ–Њ –њ–Њ—В–Њ–Љ –Њ—Б–µ–љ–Є–ї–Њ — —Г –Љ–µ–љ—П –ґ–µ –µ—Б—В—М –њ—А–Є–љ—В–µ—А, –Ї—Г—З–∞ –њ–ї–∞—Б—В–Є–Ї–∞ –Є Thinkercad! –Т Thinkercad –±—Л–ї–Є –њ—А–Њ–Є–Љ–њ–Њ—А—В–Є—А–Њ–≤–∞–љ—Л –Њ–±–∞ –Ї—А–µ–њ–ї–µ–љ–Є—П, –≤ –љ–Є—Е –±—Л–ї–Њ —Г—Б–Є–ї–µ–љ–Њ –њ–Њ—Б–∞–і–Њ—З–љ–Њ–µ –Љ–µ—Б—В–Њ –њ–Њ–і –љ–∞–њ—А–∞–≤–ї—П—О—Й—Г—О, –Є –≤ –ї–µ–≤–Њ–Љ –Ї—А–µ–њ–ї–µ–љ–Є–Є –±—Л–ї –њ–Њ–і–љ—П—В –і–≤–Є–≥–∞—В–µ–ї—М –љ–∞ 12 –Љ–Љ –≤–≤–µ—А—Е. –Ґ–µ–њ–µ—А—М –њ–Њ—Б–ї–µ –њ–µ—З–∞—В–Є –Є —Г—Б—В–∞–љ–Њ–≤–Ї–Є –≤—Б–µ —Б—В–∞–ї–Њ –≤ —Б–Њ–Њ—В–≤–µ—В—Б—В–≤–Є–Є —Б –Ј–∞–і—Г–Љ–∞–љ–љ–Њ–є –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є–µ–є.
–Х—Й–µ –љ–µ —Б–Њ–≤—Б–µ–Љ –њ–Њ–љ—П–ї –Ї–∞–Ї –≤ –Њ—А–Є–≥–Є–љ–∞–ї–µ –Ї—А–µ–њ—П—В—Б—П –Ї–Њ–љ—Ж–µ–≤–Є–Ї–Є, –Є –≤ —В–Њ–Љ –ґ–µ Thinkercad –±—Л–ї–Є —Б–њ—А–Њ–µ–Ї—В–Є—А–Њ–≤–∞–љ—Л –Ї—А–µ–њ–ї–µ–љ–Є—П –і–ї—П –љ–Є—Е.
–§–Њ—В–Њ –Ї–Њ–љ—Ж–µ–≤–Є–Ї–Њ–≤
–Ї–Њ–љ—Ж–µ–≤–Є–Ї –Њ—Б–Є X
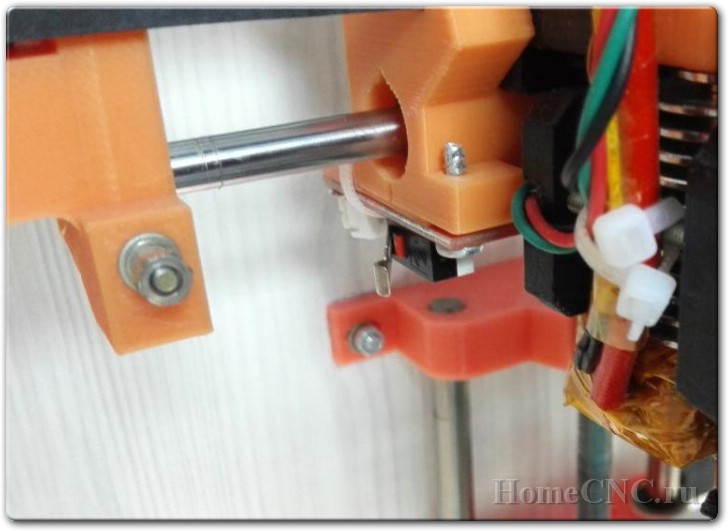
–Ї–Њ–љ—Ж–µ–≤–Є–Ї –Њ—Б–Є Y
–Ї–Њ–љ—Ж–µ–≤–Є–Ї –Њ—Б–Є Z

–Ы–Є—А–Є—З–µ—Б–Ї–Њ–µ –Њ—В—Б—В—Г–њ–ї–µ–љ–Є–µ:
–Т–Њ–Њ–±—Й–µ Thinkercad — —Н—В–Њ –љ–∞—И–µ –≤—Б–µ! –Я—А–Њ–±–Њ–≤–∞–ї –≤ –Ї–Њ–Љ–њ–∞—Б–µ –њ—А–Њ–µ–Ї—В–Є—А–Њ–≤–∞—В—М — –љ–µ –Ј–∞—И–ї–Њ, –≤ Fusion 360 –і–∞–ї—М—И–µ —А–µ–≥–Є—Б—В—А–∞—Ж–Є–Є –Є —Г—Б—В–∞–љ–Њ–≤–Ї–Є –Ї–ї–Є–µ–љ—В–∞ –љ–µ –њ—А–Њ–і–≤–Є–љ—Г–ї—Б—П, OpenSCAD –љ–µ–њ–ї–Њ—Е–∞—П —И—В—Г–Ї–∞, –µ—Б–ї–Є –љ—Г–ґ–љ–Њ –њ–∞—А–∞–Љ–µ—В—А—Л –Љ–µ–љ—П—В—М, –љ–Њ –≤—Б–µ —Н—В–Њ –љ–µ —В–Њ — –≤—Б–µ —Н—В–Њ –љ–∞–і–Њ –±—Л–ї–Њ –Є–Ј—Г—З–∞—В—М.
«–°—В–∞—А—Л–є —Б—В–∞–ї, –ї–µ–љ–Є–≤—Л–є» ©–С–µ–ї–Њ–µ —Б–Њ–ї–љ—Ж–µ –њ—Г—Б—В—Л–љ–Є.
–•–Њ—В–µ–ї–Њ—Б—М —З–µ–≥–Њ –љ–Є–±—Г–і—М —В–Є–њ–∞ –≤–Є–љ–і–Њ–≤–Њ–≥–Њ Paint'–∞, —В–Њ–ї—М–Ї–Њ –≤ 3D. –Ш —В—Г—В –њ–Њ–і —А—Г–Ї—Г –њ–Њ–њ–∞–ї—Б—П Thinkercad!
–Т –љ–µ–Љ –µ—Б–ї–Є —А–∞–Ј–Њ–±—А–∞—В—М—Б—П –њ—А–Є–Љ–Є—В–Є–≤–∞–Љ–Є, —Б–ї–Њ–ґ–µ–љ–Є–µ–Љ –Є –≤—Л—З–Є—В–∞–љ–Є–µ–Љ –Љ–Њ–ґ–љ–Њ –љ–µ—Б–ї–Њ–ґ–љ—Л–µ –і–µ—В–∞–ї–Є –њ—А–Њ–µ–Ї—В–Є—А–Њ–≤–∞—В—М, –ї–Є–±–Њ –њ–Њ–і–њ—А–∞–≤–ї—П—В—М –Є–Љ–њ–Њ—А—В–Є—А—Г–µ–Љ—Л–µ. –Х–і–Є–љ—Б—В–≤–µ–љ–љ–Њ —З–µ–≥–Њ –Њ—З–µ–љ—М –љ–µ —Е–≤–∞—В–∞–µ—В — —Н—В–Њ –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ –і–ї—П —Б–љ—П—В–Є—П —Д–∞—Б–Њ–Ї — –≤—А—Г—З–љ—Г—О —З–∞—Б—В–Њ –Љ—Г—В–Њ—А–љ–Њ –Є –ї–µ–љ–Є–≤–Њ.
–Т–Њ–Њ–±—Й–µ–Љ —Г –Ї–Њ–≥–Њ –љ–µ—В—Г –≤—А–µ–Љ–µ–љ–Є, –ї–Є–±–Њ –ї–µ–љ—М (–Ї–∞–Ї –Љ–љ–µ) —А–µ–Ї–Њ–Љ–µ–љ–і—Г—О.
–Я—А–Њ–і–Њ–ї–ґ–Є–Љ.
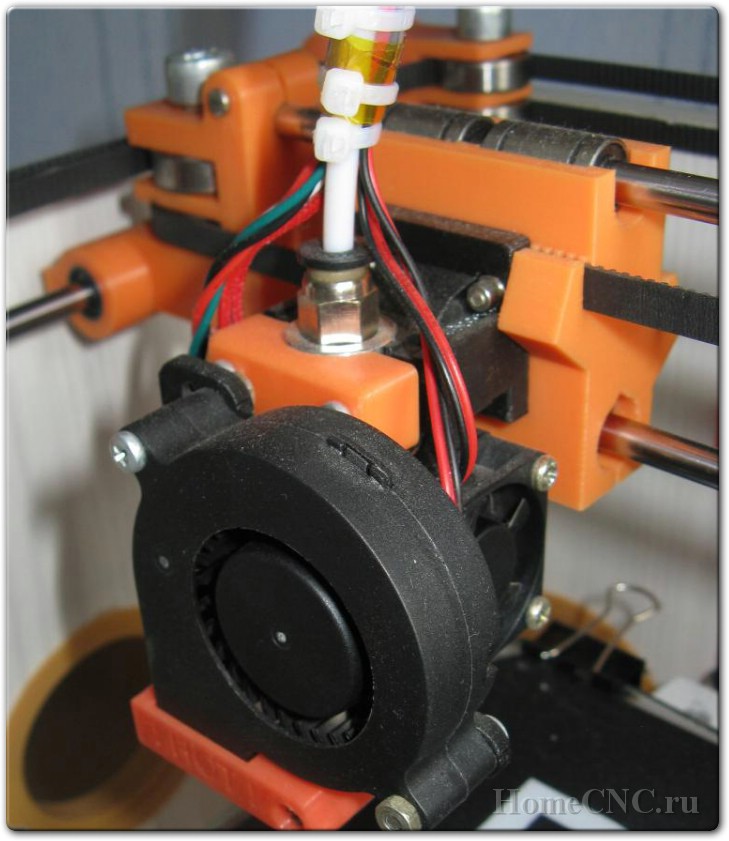
–•–Њ—В—Н–љ–і
–Ъ—А–µ–њ–ї–µ–љ–Є–µ —Е–Њ—В—Н–љ–і–∞ –Є –µ–≥–Њ –Њ—Е–ї–∞–ґ–і–µ–љ–Є–µ –Є–Ј –Њ—А–Є–≥–Є–љ–∞–ї—М–љ–Њ–≥–Њ –њ—А–Њ–µ–Ї—В–∞ –Љ–љ–µ –љ–µ –њ–Њ–љ—А–∞–≤–Є–ї–Њ—Б—М –Є —П –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї –Ї—А–µ–њ–ї–µ–љ–Є–µ –Є–Ј , –љ–Њ —Б –љ–µ–Ї–Њ—В–Њ—А—Л–Љ–Є –Є–Ј–Љ–µ–љ–µ–љ–Є—П–Љ–Є (–Њ–±—А–µ–Ј–∞–ї –Ї—А–µ–њ–ї–µ–љ–Є–µ –Є–љ–і—Г–Ї—Ж–Є–Њ–љ–љ–Њ–≥–Њ –і–∞—В—З–Є–Ї–∞ –Є –љ–µ–Љ–љ–Њ–≥–Њ –Њ–±—А–µ–Ј–∞–ї –њ–Њ –Ї—А–∞—П–Љ, —З—В–Њ–±—Л –≤—Б—В–∞–ї–Њ –≤ –Ї–∞—А–µ—В–Ї—Г).
–Ї—А–µ–њ–ї–µ–љ–Є–µ —Е–Њ—В—Н–љ–і–∞
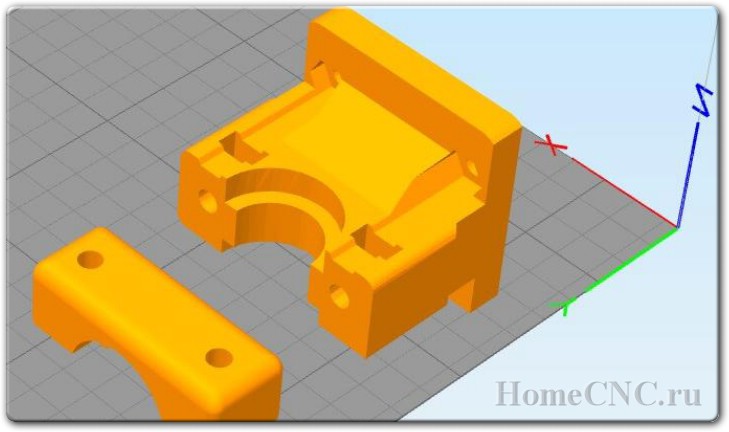
–њ–µ—З–∞—В–∞—В—М –Ї–∞–Ї –љ–∞ –Ї–∞—А—В–Є–љ–Ї–µ, –ї–µ–≤—Г—О –і–µ—В–∞–ї—М —Б –њ–Њ–і–і–µ—А–ґ–Ї–∞–Љ–Є. –Х—Б–ї–Є –ї–µ–≤—Г—О –і–µ—В–∞–ї—М –њ–µ—А–µ–≤–µ—А–љ—Г—В—М –њ–Њ X –љ–∞ 90 –≥—А–∞–і—Г—Б–Њ–≤, –≤ –Љ–µ—Б—В–µ –Ј–∞–Ї–ї–∞–і–Ї–Є –≥–∞–µ–Ї —А–∞–Ј–Њ—А–≤–∞–ї–Њ –њ–Њ —Б–ї–Њ—П–Љ, –љ–µ—Б–Љ–Њ—В—А—П –љ–∞ 100% –Ј–∞–њ–Њ–ї–љ–µ–љ–Є–µ. –Р —В–∞–Ї — 3 –њ–µ—А–Є–Љ–µ—В—А–∞ –Є –≤ –њ—Г—В—М.
–Ю—Е–ї–∞–ґ–і–µ–љ–Є–µ —Е–Њ—В—Н–љ–і–∞
–Ю—Е–ї–∞–ґ–і–µ–љ–Є–µ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї –Є–Ј , —В–Њ–ї—М–Ї–Њ –±—А–∞–ї –Њ—Е–ї–∞–ґ–і–µ–љ–Є–µ –і–ї—П –ї–µ–≤–Њ–≥–Њ —Е–Њ—В—Н–љ–і–∞, –љ–∞ —Б–≤–Њ–µ–Љ –њ–Њ–≤–µ—А–љ—Г–ї –љ–∞ 90 –≥—А–∞–і—Г—Б–Њ–≤.
–Ъ–∞–Ї —Г–Ї–∞–Ј—Л–≤–∞–ї –≤ –љ–∞—З–∞–ї–µ, —Е–Њ—В—Н–љ–і — –Ї–Є—В–∞–є—Б–Ї–Є–є E3D V6, –њ–Њ–і 1,75 —Д–Є–ї–∞–Љ–µ–љ—В, —Б–Њ–њ–ї–Њ –љ–∞ –і–∞–љ–љ—Л–є –Љ–Њ–Љ–µ–љ—В 0,4. –Ґ–µ—А–Љ–Њ–±–∞—А—М–µ—А –њ—А–Њ—Е–Њ–і–љ–Њ–є –њ–Њ–і 4 –Љ–Љ —В–µ—Д–ї–Њ–љ–Њ–≤—Г—О —В—А—Г–±–Ї—Г –і–Њ —Б–∞–Љ–Њ–≥–Њ —Б–Њ–њ–ї–∞. –Т —Б–≤–Њ–µ –≤—А–µ–Љ—П –љ–∞–Љ—Г—З–Є–ї—Б—П —Б –њ—А—О—И–µ–є, —Б–µ–є—З–∞—Б —В–Њ–ї—М–Ї–Њ —В–∞–Ї–Є–µ –Є –Є—Б–њ–Њ–ї—М–Ј—Г—О. –Ф–ї—П –Њ—Е–ї–∞–ґ–і–µ–љ–Є—П —Е–Њ—В—Н–љ–і–∞ –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П 3010 –≤–µ–љ—В–Є–ї—П—В–Њ—А, —Е–≤–∞—В–∞–µ—В, —В–Њ–ї—М–Ї–Њ —И—Г–Љ–љ—Л–µ –Њ–љ–Є (–љ–∞–і–Њ —З—В–Њ –њ–Њ–ї—Г—З—И–µ, —В–Њ–ї—М–Ї–Њ —Б –ґ–∞–±–Њ–є –і–Њ–≥–Њ–≤–Њ—А–Є—В—Б—П). –Ф–ї—П –Њ—Е–ї–∞–ґ–і–µ–љ–Є—П –і–µ—В–∞–ї–Є — —В—Г—А–±–Є–љ–Ї–∞ 5015, –љ–Њ –Њ–±–і—Г–≤–∞–µ—В –і–µ—В–∞–ї—М —В–Њ–ї—М–Ї–Њ —Б –Њ–і–љ–Њ–є —Б—В–Њ—А–Њ–љ—Л. –Т –њ–ї–∞–љ–∞—Е –Ј–∞–њ–Є–ї–Є—В—М —А–∞–і–Є–∞–ї—М–љ—Л–є –Њ–±–і—Г–≤.
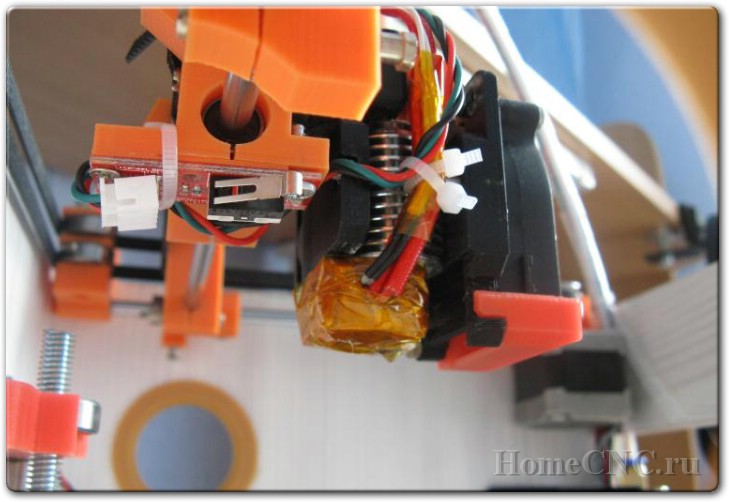
–Ъ–∞—А–µ—В–Ї–∞ —Б —Е–Њ—В—Н–љ–і–Њ–Љ
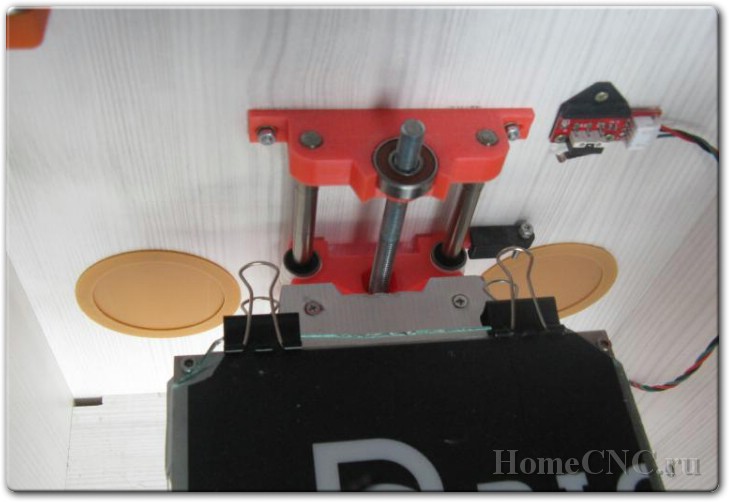
–Ю—Б—М Z, —Б—В–Њ–ї
–Ъ—А–µ–њ–ї–µ–љ–Є–µ –љ–∞–њ—А–∞–≤–ї—П—О—Й–Є—Е –Њ—Б–Є Z –Є –Ї—А–µ–њ–ї–µ–љ–Є–µ —Б—В–Њ–ї–∞ –≤–Ј—П—В–Њ —Б , –љ–Њ –Њ–њ—П—В—М –ґ–µ —Б –Є–Ј–Љ–µ–љ–µ–љ–Є—П–Љ–Є, –Ї —В–Њ–Љ—Г –ґ–µ –Є —Н—В–Њ–Љ –њ—А–Њ–µ–Ї—В–µ –Є –≤ –Њ—А–Є–≥–Є–љ–∞–ї—М–љ–Њ–Љ, –≤ –≤–µ—А—Е–љ–µ–Љ –Ї—А–µ–њ–ї–µ–љ–Є–Є —Б–Љ–µ—Й–µ–љ–Њ –њ–Њ—Б–∞–і–Њ—З–љ–Њ–µ –Љ–µ—Б—В–Њ –і–ї—П –њ–Њ–і—И–Є–њ–љ–Є–Ї–∞. –Ґ–∞–Ї –ґ–µ –њ–Њ—Б–ї–µ —Б–±–Њ—А–Ї–Є –Њ–Ї–∞–Ј–∞–ї–Њ—Б—М, —З—В–Њ –ї–Є–љ–µ–є–љ—Л–µ –њ–Њ–і—И–Є–њ–љ–Є–Ї–Є –±–Њ–ї—В–∞—О—В—Б—П –≤ —Б–≤–Њ–Є—Е –њ–Њ—Б–∞–і–Њ—З–љ—Л—Е –Љ–µ—Б—В–∞—Е, —Г—Б—В—А–∞–љ–Є–ї —Б –њ–Њ–Љ–Њ—Й—М—О –§–£–Ь –ї–µ–љ—В—Л.
–°—В–Њ–ї —Б–і–µ–ї–∞–ї –Ї—Г—Б–Ї–∞ –љ–µ—А–ґ–∞–≤–µ–є–Ї–Є 15*15 —Б–Љ, —В–Њ–ї—Й–Є–љ–Њ–є 1,5 –Љ–Љ. –Ъ–∞–ї–Є–±—А–Њ–≤–Ї–∞ —Б—В–Њ–ї–∞ –≤—Л–њ–Њ–ї–љ—П–µ—В—Б—П –њ–Њ —Б—В–∞—А–Є–љ–Ї–µ, –њ—А–Є –њ–Њ–Љ–Њ—Й–Є –њ–Њ–і–Ї—А—Г—З–Є–≤–∞–љ–Є—П –≤–Є–љ—В–Њ–≤ –љ–∞ —Г–≥–ї–∞—Е —Б—В–Њ–ї–∞ –Є –±—Г–Љ–∞–ґ–Ї–Є. –Я–Њ–і–Њ–≥—А–µ–≤–∞ –љ–µ—В, –њ–µ—З–∞—В–∞—О PLA –њ–ї–∞—Б—В–Є–Ї–Њ–Љ. –°—В–Њ–ї –њ–Њ–Ї—А—Л—В –Њ–±—Л—З–љ—Л–Љ 4 –Љ–Љ –Њ–Ї–Њ–љ–љ—Л–Љ —Б—В–µ–Ї–ї–Њ–Љ, –Ј–∞–Ї—А–µ–њ–ї–µ–љ–љ–Њ–Љ –Ї–∞–љ—Ж–µ–ї—П—А—Б–Ї–Є–Љ–Є –Ј–∞–ґ–Є–Љ–∞–Љ–Є.–Э–∞ —Б—В–µ–Ї–ї–µ –љ–∞–Ї–ї–µ–є–Ї–∞, –њ–Њ–і—А–µ–Ј–∞–љ–љ–∞—П –і–Њ –љ—Г–ґ–љ—Л—Е —А–∞–Ј–Љ–µ—А–Њ–≤. –Ъ—Г–њ–ї–µ–љ–∞ –Є –≤–њ–µ—З–∞—В–ї–µ–љ–Є—П –≤–µ—Б—М–Љ–∞ –њ—А–Њ—В–Є–≤–Њ—А–µ—З–Є–≤—Л–µ — —Б—А–∞–Ј—Г –≤—Б–µ –Ї–ї–µ–Є–ї–Њ—Б—М –љ–Њ—А–Љ–∞–ї—М–љ–Њ –Є —Б–љ–Є–Љ–∞–ї–Њ—Б—М –±–µ–Ј —Г—Б–Є–ї–Є–є, –љ–Њ –њ–Њ –Љ–µ—А–µ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—П —Б–љ–Є–Љ–∞—В—М –љ–∞–њ–µ—З–∞—В–∞–љ–љ–Њ–µ —Б—В–∞–ї–Њ –≤—Б–µ —В—А—Г–і–љ–µ–µ (–µ—Б–ї–Є –њ—А–Є—Б–Љ–Њ—В—А–µ—В—М—Б—П –≤–Є–і–љ–Њ –і–≤–µ –≥–ї—Г–±–Њ–Ї–Є–µ —Ж–∞—А–∞–њ–Є–љ—Л –Њ—В —И–њ–∞—В–µ–ї—П), –Є –њ–µ—А–≤—Л–є —Б–ї–Њ–є –љ–Њ—А–Љ–∞–ї—М–љ–Њ –ї–Њ–ґ–Є—В—М—Б—П —В–Њ–ї—М–Ї–Њ –µ—Б–ї–Є –њ—А–Њ—В–µ—А–µ—В—М —Б–њ–Є—А—В–Њ–Љ.
–Ш—Б—В–Њ—А–Є—П –њ—А–Њ–Є—Б—Е–Њ–ґ–і–µ–љ–Є—П –Њ—В–≤–µ—А—Б—В–Є–є –≤ —Б—В–µ–љ–Ї–∞—Е
–Я–Њ—Б–ї–µ —Б–±–Њ—А–Ї–Є –Є –љ–∞—Б—В—А–Њ–є–Ї–Є, –≤–Ї–ї—О—З–Є–ї –њ—А–Є–љ—В–µ—А –Є –Є—Б–њ—Г–≥–∞–ї—Б—П — –њ—А–Є –њ–µ—А–µ–Љ–µ—Й–µ–љ–Є–Є –њ–Њ –Њ—Б—П–Љ XY –±—Л–ї —В–∞–Ї–Њ–є –Ј–≤—Г–Ї, –Ї–∞–Ї –µ—Б–ї–Є –±—Л —А—П–і–Њ–Љ —Б—В–Њ—П–ї–Є –і–≤–∞ –њ–Є–Њ–љ–µ—А–∞ —Б –±–∞—А–∞–±–∞–љ–∞–Љ–Є –Є –≤—Л–±–Є–≤–∞–ї–Є –љ–∞ –љ–Є—Е –±–∞—А–∞–±–∞–љ–љ—Г—О –і—А–Њ–±—М. –І—В–Њ –±—Л —Г–Љ–µ–љ—М—И–Є—В—М –і–∞–љ–љ—Л–є —Н—Д—Д–µ–Ї—В, –≤–Ј—П–ї –Ї–Њ—А–Њ–љ–Ї–Є –Є –љ–∞—Б–≤–µ—А–ї–Є–ї –Њ—В–≤–µ—А—Б—В–Є–є, –љ–Њ —Н—Д—Д–µ–Ї—В –Њ—В —В–∞–Ї–Њ–≥–Њ –∞–њ–≥—А–µ–є–і–∞ –Њ–Ї–∞–Ј–∞–ї—Б—П –Љ–Є–љ–Є–Љ–∞–ї—М–љ—Л–є. –Ш –њ—А–Њ–µ–Ї—В –±—Л–ї –Ј–∞–±—А–Њ—И–µ–љ. –І–µ—А–µ–Ј –љ–µ–Ї–Њ—В–Њ—А–Њ–µ –≤—А–µ–Љ—П –љ–∞ —В—Г–і–µ–є–Ї–µ –њ—А–Њ—З–Є—В–∞–ї . –Ф—А–∞–є–≤–µ—А–∞ –±—Л–ї–Є –Ј–∞–Ї–∞–Ј–∞–љ—Л –Є —З–µ—А–µ–Ј –Љ–µ—Б—П—Ж –Њ–ґ–Є–і–∞–љ–Є—П —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ—Л. –Я–Њ—Б–ї–µ —Г—Б—В–∞–љ–Њ–≤–Ї–µ —Н—Д—Д–µ–Ї—В –њ–Њ—А–∞–Ј–Є—В–µ–ї—М–љ—Л–є — —Б–∞–Љ—Л–є –≥—А–Њ–Љ–Ї–Є–є —Г–Ј–µ–ї — —Н—В–Њ —В–Њ—В —Б–∞–Љ—Л–є –≤–µ–љ—В–Є–ї—П—В–Њ—А 3010. –Р –њ—А–Њ—А–µ–Ј–∞–љ–љ—Л–µ –Њ—В–≤–µ—А—Б—В–Є—П –њ—А–Є—И–ї–Њ—Б—М –Њ–±–ї–∞–≥–Њ—А–∞–ґ–Є—В–≤–∞—В—М, –љ–Њ –Ј–∞—В–Њ –µ—Б—В—М –Ј–∞ —З—В–Њ –і–µ—А–ґ–∞—В—М –њ—А–Є –њ–µ—А–µ–љ–Њ—Б–Ї–µ :)
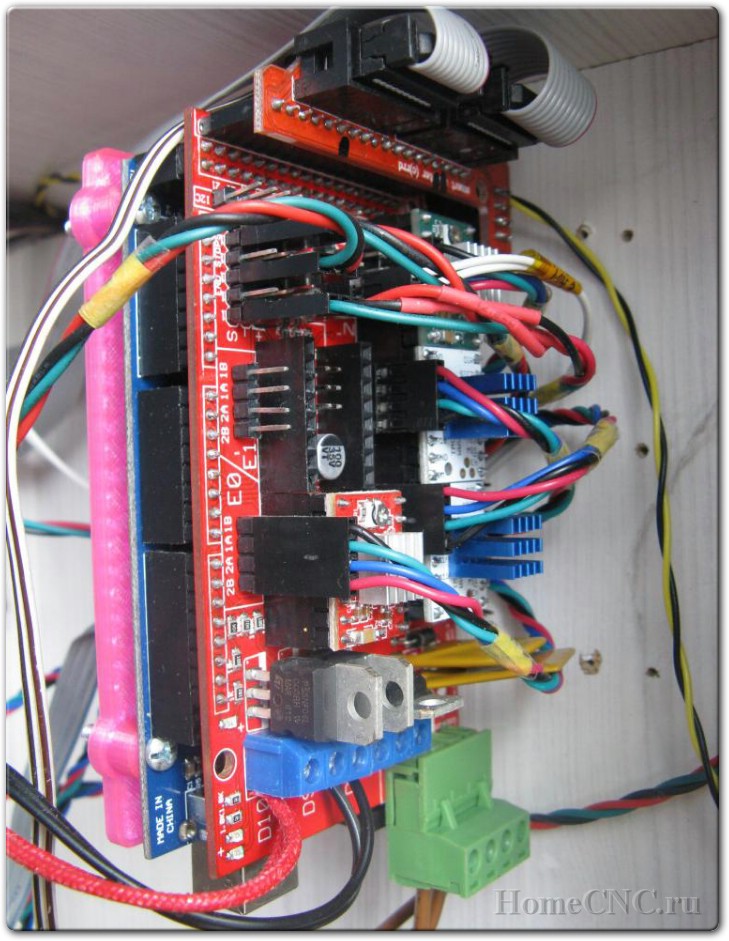
–≠–ї–µ–Ї—В—А–Њ–љ–Є–Ї–∞ –Є –њ—А–Њ—И–Є–≤–Ї–∞
–°—В–∞–љ–і–∞—А—В–љ—Л–є –љ–∞–±–Њ—А –љ–∞—З–Є–љ–∞—О—Й–µ–≥–Њ –Ї–Њ–љ—Б—В—А—Г–Ї—В–Њ—А–∞ — Arduino Mega 2560 + RAMPS 1.4. –Р—А–і—Г–Є–љ–∞ —Б–Њ —Б–≤–Њ–Є–Љ –±–Ј–Є–Ї–Њ–Љ — –љ–∞ –Ї–Њ–Љ–њ–ї–µ–Ї—В–љ–Њ–Љ –њ–Њ–ї—Г–Љ–µ—В—А–Њ–≤–Њ–Љ USB –Ї–∞–±–µ–ї–µ —Б –Ї–Њ–Љ–њ–Њ–Љ —А–∞–±–Њ—В–∞–µ—В –љ–Њ—А–Љ–∞–ї—М–љ–Њ. –Э–∞ –±–Њ–ї–µ–µ –і–ї–Є–љ–љ—Л—Е —Г–ґ–µ –≤—Б–µ — –≤–Є–ї—Л. –°–Љ–µ–љ–∞ –њ–Њ—А—В–Њ–≤, USB 3.0 — —Д–Є–Њ–ї–µ—В–Њ–≤–Њ, –љ–µ —А–∞–±–Њ—В–∞–µ—В –Є –≤—Б–µ.
–Ф–ї—П –≥—А–∞—Д–Є—З–µ—Б–Ї–Њ–≥–Њ –Њ—В–Њ–±—А–∞–ґ–µ–љ–Є—П –Є —А–∞–±–Њ—В—Л —Б –Ї–∞—А—В–Њ–є –њ–∞–Љ—П—В–Є, –Є–Ј–љ–∞—З–∞–ї—М–љ–Њ —Е–Њ—В–µ–ї —Б–і–µ–ї–∞—В—М . –Т—Б–µ –Ї—Г–њ–Є–ї, —Б–Њ–±—А–∞–ї, –љ–∞—Б—В—А–Њ–Є–ї, –≤–Ї–ї—О—З–Є–ї… –Є –љ–µ –≤–Ј–ї–µ—В–µ–ї–Њ :( –Ш–Ј–Њ–±—А–∞–ґ–µ–љ–Є–µ –њ–Њ—П–≤–ї—П–µ—В—Б—П –љ–∞ —Б–µ–Ї—Г–љ–і—Г –Є –Є—Б—З–µ–Ј–∞–µ—В. –Я–Њ—З–µ–Љ—Г —В–∞–Ї, –њ–Њ–љ—П—В—М –љ–µ —Б–Љ–Њ–≥, –∞ –њ–Њ–Ј–љ–∞–љ–Є–є –≤ –∞—А–і—Г–Є–љ–Њ—Б—В—А–Њ–Є—В–µ–ї—М—Б—В–≤–µ –Љ–∞–ї–Њ–≤–∞—В–Њ. –Ф–ї—П –Є—Б–њ—А–∞–≤–ї–µ–љ–Є—П —Б–Є—В—Г–∞—Ж–Є–Є –љ–∞ Banggood –Ј–∞–Ї–∞–Ј–∞–ї MKS Mini 12864LCD –Ј–∞ 9$ (—В–Њ–≥–і–∞ –µ—Й–µ –Ї—Г–њ–Њ–љ—Л 5 –Њ—В 10 –Ј–∞ –њ–Њ–Є–љ—В—Л —А–∞–±–Њ—В–∞–ї–Є, –±—Л–ї–Њ –≤—А–µ–Љ—П). –Я—А–Є –њ–Њ–Ї—Г–њ–Ї–µ —Г—З–Є—В—Л–≤–∞–є—В–µ, —З—В–Њ –і–ї—П RAMPS –љ—Г–ґ–µ–љ . –° —Н—В–Є–Љ –Ї–Њ—В—А–Њ–ї–ї–µ—А–Њ–Љ –≤—Б–µ –њ–Њ—И–ї–Њ –њ–Њ–≤–µ—Б–µ–ї–µ–µ — –≤—Б–µ –≤–Ј–ї–µ—В–µ–ї–Њ —Б –њ–µ—А–≤–Њ–≥–Њ —А–∞–Ј–∞.
–Ъ–Њ–љ—В—А–Њ–ї–ї–µ—А –љ–∞–і–Њ –±—Л–ї–Њ –Ї–∞–Ї —В–Њ –Ї—А–∞—Б–Є–≤–Њ —А–∞–Ј–Љ–µ—Б—В–Є—В—М — –Є –Њ–њ—П—В—М –≤–Ј—П–ї –Є —В–≤–Њ—А—З–µ—Б–Ї–Є –њ–µ—А–µ—А–∞–±–Њ—В–∞–ї :)
–Я—А–Њ –і—А–∞–є–≤–µ—А—Л –љ–∞–њ–Є—Б–∞–љ–Њ –≤—Л—И–µ — 2*TMC2208 (–Њ—Б—М X,Y), 2*A4988 (–Њ—Б—М Z, —Н–Ї—Б—В—А—Г–і–µ—А). –Ф—А–∞–є–≤–µ—А–∞ –љ–∞—Б—В—А–∞–Є–≤–∞–ї –љ–∞ —В–Њ–Ї 0,7-0,8–Р. –Я—А–Є –љ–∞—Б—В—А–Њ–є–Ї–µ TMC2208, –µ—Б—В—М —Б–µ—А—М–µ–Ј–љ—Л–є –љ—О–∞–љ—Б — –љ–∞—Б—В—А–Њ–є–Ї–∞ —В–Њ–Ї–∞ –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П –њ—А–Є –Њ—В–Ї–ї—О—З–µ–љ–љ—Л—Е –і–≤–Є–≥–∞—В–µ–ї—П—Е! –Ъ–Њ–≥–і–∞ –Љ–µ–љ—П–ї A4988 –љ–∞ TMC2208, —В–Њ –≤ –њ—А–Њ—И–Є–≤–Ї–µ –љ–Є—З–µ–≥–Њ –љ–µ —В—А–Њ–≥–∞–ї, –њ–µ—А–µ–Љ—Л—З–Ї–Є –≤ RAMPS'–µ —В–Њ–ґ–µ –љ–µ –≤—Л–љ–Є–Љ–∞–ї, —В–Њ–ї—М–Ї–Њ —А–∞–Ј—К–µ–Љ—Л —И–∞–≥–Њ–≤–Є–Ї–Њ–≤ –њ–µ—А–µ–≤–µ—А–љ—Г–ї (–Љ–Њ–ґ–љ–Њ –±—Л–ї–Њ –љ–Є—З–µ–≥–Њ –љ–µ —В—А–Њ–≥–∞—В—М, —В–Њ–≥–і–∞ –≤ –њ—А–Њ—И–Є–≤–Ї–µ –љ–∞–і–Њ –±—Л–ї–Њ –Љ–µ–љ—П—В—М –њ–∞—А–∞–Љ–µ—В—А INVERT_X_DIR, INVERT_Y_DIR, –љ–Њ –≤ —Б–Є–ї—Г –њ—А–Є—А–Њ–і–љ–Њ–є –ї–µ–љ–Є —А–∞–Ј–≤–µ—А–љ—Г—В—М —А–∞–Ј—К–µ–Љ—Л –Њ–Ї–∞–Ј–∞–ї–Њ—Б—М –±—Л—Б—В—А–µ–µ). –Ш —З—Г—В—М –љ–µ –Ј–∞–±—Л–ї, –Њ—З–µ–љ—М —А–µ–Ї–Њ–Љ–µ–љ–і—Г–µ—В—Б—П –≤ –Љ–µ–љ—О –њ—А–Є–љ—В–µ—А–∞ –Є —Б–±—А–Њ—Б–Є—В—М –љ–∞—Б—В—А–Њ–є–Ї–Є EEPROM.
–Я–Њ—Б–Ї–Њ–ї—М–Ї—Г –њ–µ—З–∞—В–∞—О PLA –Є –љ–µ—В –њ–Њ–і–Њ–≥—А–µ–≤–∞ —Б—В–Њ–ї–∞, —В–Њ –Ј–∞–њ–Є—В–∞–љ–Њ –±–ї–Њ–Ї–Њ–Љ –њ–Є—В–∞–љ–Є—П –љ–∞ 10–Р, —З–µ–≥–Њ –≤–њ–Њ–ї–љ–µ –і–Њ—Б—В–∞—В–Њ—З–љ–Њ.
–Ф–∞–±—Л –±—Г—В–µ—А–±—А–Њ–і –Є–Ј –Љ–µ–≥–Є, —А–∞–Љ–њ—Б–∞ –Є –і—А–∞–є–≤–µ—А–Њ–≤ –Љ–µ–љ—М—И–µ –≥—А–µ–ї—Б—П, –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П 8 —Б–∞–љ—В–Є–Љ–µ—В—А–Њ–≤—Л–є –≤–µ–љ—В–Є–ї—П—В–Њ—А –Є–Ј —Б—В–∞—А–Њ–≥–Њ –±–ї–Њ–Ї–∞ –њ–Є—В–∞–љ–Є—П (–њ–Њ –Љ–Њ–Є–Љ –њ–Њ–і–Њ–Ј—А–µ–љ–Є—П–Љ –µ—Й–µ –Є–Ј –Р–Ґ –С–Я –Є –ї–µ—В –µ–Љ—Г –њ–Њ–і 30, –љ–Њ –і–Њ–≤–Њ–ї—М–љ–Њ —В–∞–Ї–Є —В–Є—Е–Є–є –і–ї—П —Б–≤–Њ–µ–≥–Њ –≤–Њ–Ј—А–∞—Б—В–∞).
–Ф–ї—П —Г–њ—А–∞–≤–ї–µ–љ–Є—П –≤—Б–µ–Љ –і–Њ–±—А–Њ–Љ –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П Marlin 1.1.5 (–љ–∞ –Љ–Њ–Љ–µ–љ—В —Б–±–Њ—А–Ї–Є —Н—В–Њ –±—Л–ї–∞ –∞–Ї—В—Г–∞–ї—М–љ–∞—П –≤–µ—А—Б–Є—П). –Я—А–Њ—И–Є–≤–Ї–∞ –±—Л–ї–∞ –≤–Ј—П—В–∞ —Б marlinfw.org –Є –љ–∞—Б—В—А–Њ–µ–љ–∞ —Б –љ—Г–ї—П. –Я–Њ—Б–Ї–Њ–ї—М–Ї—Г —Г–ґ–µ –±—Л–ї–∞ —Б–Њ–±—А–∞–љ–∞ –њ—А—О—И–∞ –Є —А–µ–Љ–љ–Є, —И–њ—Г–ї–Є –Є —И–њ–Є–ї—М–Ї–Є –Є—Б–њ–Њ–ї—М–Ј—Г—О—В—Б—П –Њ–і–Є–љ–∞–Ї–Њ–≤—Л–µ, –њ–Њ—З—В–Є –≤—Б–µ –Њ—Б–љ–Њ–≤–љ—Л–µ –њ–∞—А–∞–Љ–µ—В—А—Л –±—Л–ї–Є –≤–Ј—П—В—Л –Є–Ј –њ—А—О—И–Є–љ–Њ–є –њ—А–Њ—И–Є–≤–Ї–Є.
–Я–Њ—Б–Ї–Њ–ї—М–Ї—Г –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –Ї–Є–љ–µ–Љ–∞—В–Є–Ї–∞ CoreXY, —З—Г—В—М –≥–Њ–ї–Њ–≤—Г –љ–µ –њ–Њ–ї–Њ–Љ–∞–ї —Б —Н—В–Є–Љ–Є –њ–∞—А–∞–Љ–µ—В—А–∞–Љ–Є:
#define INVERT_X_DIR true
#define INVERT_Y_DIR true
#define INVERT_Z_DIR true
–С—А–∞–ї –Є—Е –Є–Ј –њ—А–Њ—И–Є–≤–Ї–Є –Њ—А–Є–≥–Є–љ–∞–ї—М–љ–Њ –њ—А–Њ–µ–Ї—В–∞, –њ–Њ–і—Б–Љ–∞—В—А–Є–≤–∞–ї —Г –і—А—Г–≥–Є—Е, –њ–µ—А–µ–≤–Њ—А–∞—З–Є–≤–∞–ї —А–∞–Ј—К–µ–Љ—Л —И–∞–≥–Њ–≤–Є–Ї–Њ–≤ –Є —Е–Њ—В—М —В—Л —В—А–µ—Б–љ–Є –љ–µ –і–≤–Є–≥–∞–ї–∞—Б—М –Ї–∞—А–µ—В–Ї–∞ –њ–Њ –Њ—Б—П–Љ XY —В–∞–Ї –Ї–∞–Ї –љ–∞–і–Њ — –µ—Б–ї–Є –њ–Њ –Њ–і–љ–Њ–є –Њ—Б–Є –љ–Њ—А–Љ–∞–ї—М–љ–Њ, —В–Њ –њ–Њ –≤—В–Њ—А–Њ–є –≤ –Є–љ–≤–µ—А—Б–Є–Є. –Э–Њ –≤ –Ї–Њ–љ—Ж–µ –Ї–Њ–љ—Ж–Њ–≤ –љ–∞—И–µ–ї —В—А–µ–±—Г–µ–Љ—Г—О –Ї–Њ–Љ–±–Є–љ–∞—Ж–Є—О –Є –≤—Б–µ –Ј–∞—А–∞–±–Њ—В–∞–ї–Њ —В–∞–Ї –Ї–∞–Ї –љ–∞–і–Њ.
–Х—Б–ї–Є –Ї–Њ–Љ—Г –Є–љ—В–µ—А–µ—Б–љ–Њ — .
–≠–ї–µ–Ї—В—А–Њ–љ–Є–Ї–∞ –Є –њ—А–Њ—И–Є–≤–Ї–∞
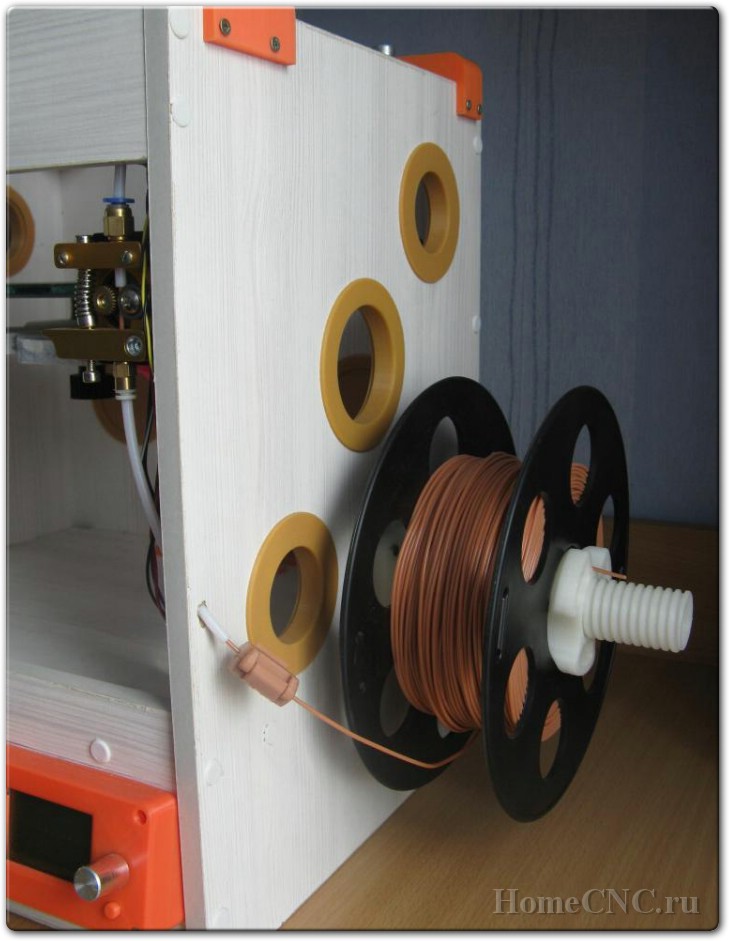
–Ю—Б—В–∞–ї—Б—П –і–µ—А–ґ–∞—В–µ–ї—М –Ї–∞—В—Г—И–Ї–Є. –≠—В–Њ –Ї–≤–Є–љ—В—Н—Б—Б–µ–љ—Ж–Є—П –Є–Ј –і–≤—Г—Е –њ—А–Њ–µ–Ї—В–Њ–≤ — –Є . –Я–Њ—Б–Ї–Њ–ї—М–Ї—Г —П –њ–µ—З–∞—В–∞—О –љ–∞ –±–∞–ї–Ї–Њ–љ–µ, –∞ —Б–∞–Љ –њ—А–Є–љ—В–µ—А —Е—А–∞–љ–Є—В—Б—П –≤ –Ї–Њ–Љ–љ–∞—В–µ, —В–Њ –≤—Л—И–ї–Њ –Њ—З–µ–љ—М –њ—А–∞–Ї—В–Є—З–љ–Њ –Є —Б–Є–ї—М–љ–Њ —Г–Љ–µ–љ—М—И–∞–µ—В –≥–∞–±–∞—А–Є—В—Л –њ—А–Є —Е—А–∞–љ–µ–љ–Є–Є.
–Ф–µ—А–ґ–∞—В–µ–ї—М –Ї–∞—В—Г—И–Ї–Є
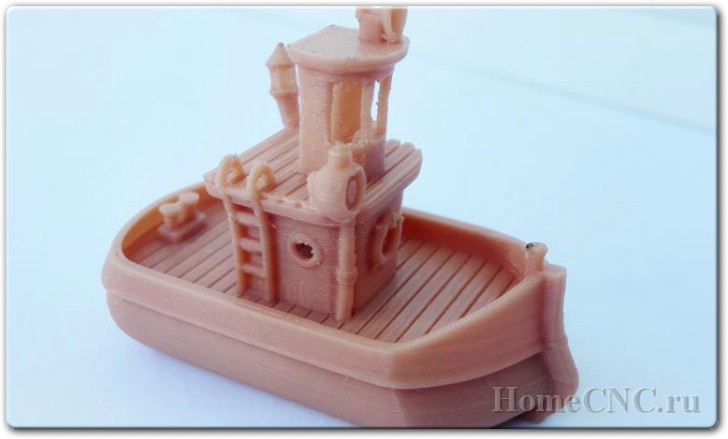
–Я—А–Є–Љ–µ—А—Л –њ–µ—З–∞—В–Є
–Т—Б–µ –њ–µ—З–∞—В–∞–ї–Њ—Б—М PLA –њ–ї–∞—Б—В–Є–Ї–Њ–Љ –Њ—В Bestfilament, —В–µ–Љ–њ–µ—А–∞—В—Г—А–∞ 210-215 –≥—А., –Њ–±–і—Г–≤ –њ–Њ—Б–ї–µ –њ–µ—А–≤–Њ–≥–Њ —Б–ї–Њ—П.
— —Б–ї–Њ–ґ–љ–∞—П –Љ–Њ–і–µ–ї—М, –љ–∞–њ–Њ–і–Њ–±–Є–µ , –Љ–Њ—Б—В—Л, –∞—А–Ї–Є, –Љ–љ–Њ–≥–Њ –Љ–µ–ї–Ї–Є—Е –і–µ—В–∞–ї–µ–є, —Г–Љ–µ–љ—М—И–µ–љ–љ–∞—П –≤ 2 —А–∞–Ј–∞, –њ–µ—З–µ—В–∞–ї–∞—Б—М –±–µ–Ј –њ–Њ–і–і–µ—А–ґ–µ–Ї, –Ј–∞–њ–Њ–ї–љ–µ–љ–Є–µ 30%, —Б–ї–Њ–є 0.1

–Х—Й–µ —Д–Њ—В–Њ –ї–Њ–і–Ї–Є
— –µ—Й–µ –Њ–і–љ–∞ —В–µ—Б—В–Њ–≤–∞—П –Љ–Њ–і–µ–ї—М, —Г –Љ–µ–љ—П –Є—Е —Ж–µ–ї—Л–є –Њ—В—А—П–і :)
–°–ї–Њ–є 0,2, –Ј–∞–њ–Њ–ї–љ–µ–љ–Є–µ 30%

–Э–∞ –≤—Б–µ—Е —Д–Њ—В–Њ –≥–і–µ –њ—А–Є—Б—Г—В—Б—В–≤—Г–µ—В –Њ—В–≤–µ—А—Б—В–Є—П, –Ј–∞–Ї—А—Л—В—Л–µ –Ј–∞–≥–ї—Г—И–Ї–∞–Љ–Є –ґ–µ–ї—В–Њ-–Ї–Њ—А–Є—З–љ–µ–≤–Њ–≥–Њ —Ж–≤–µ—В–∞ –љ–∞–њ–µ—З–∞—В–∞–љ—Л –љ–∞ —Н—В–Њ–Љ –ґ–µ –њ—А–Є–љ—В–µ—А–µ — –Є–і–µ–Њ–ї–Њ–≥–Є—П RepRap –≤ –і–µ–є—Б—В–≤–Є–Є.
–Ш –њ–Њ–і —Б–њ–Њ–є–ї–µ—А–Њ–Љ –њ–∞—А—Г –Љ–Њ–і–µ–ї–µ–Ї
–§–Њ—В–Њ –љ–∞–њ–µ—З–∞—В–∞–љ–љ–Њ–≥–Њ
–°–Ї–Њ–ї—М–Ї–Њ —Н—В–Њ —Б—В–Њ–Є–ї–Њ:
–Ю—Б—В–∞–ї—Б—П —И–Ї—Г—А–љ—Л–є –≤–Њ–њ—А–Њ—Б — —Б–Ї–Њ–ї—М–Ї–Њ —Н—В–Њ —Б—В–Њ–Є–ї–Њ?
–Т–Њ—В —Б–µ–є—З–∞—Б –Є –њ–Њ—Б—З–Є—В–∞–µ–Љ
–®–∞–≥–Њ–≤—Л–µ –і–≤–Є–≥–∞—В–µ–ї–Є 4 —И—В. — –Љ–љ–µ –±–µ—Б–њ–ї–∞—В–љ–Њ, –µ—Б–ї–Є –Є—Б–Ї–∞—В—М –њ–Њ –±–∞—А–∞—Е–Њ–ї–Ї–∞–Љ 2-3$, –≤–Њ–Ј—М–Љ–µ–Љ 10$
4 —И—В. — 1,72$
2 —И—В. — 12,32$
— 1,98$
— 0,69$
— 5,12$
— 0,92$
— 12,70$ (–Љ–љ–µ –Њ–±–Њ—И–ї–Њ—Б—М –≤ 9$)
— 17,04$
— 3,64$
— 3,42$
2 —И—В. — 1,34$
4 —И—В. — 1,2$
4 —И—В. — 1,72$
4 —И—В. — 1,08$
2 —И—В. — 0,94$
–Я–Њ–і—И–Є–њ–љ–Є–Ї 608ZZ 9 —И—В. — 1,8$ (—Б—Б—Л–ї–Ї–Є –љ–µ –і–∞—О, –±—А–∞–ї –љ–∞ —А–∞—Б–њ—А–Њ–і–∞–ґ–µ –њ–Њ 0,2$, –Ї–∞—З–µ—Б—В–≤–Њ –≥, –љ–Њ—А–Љ–∞–ї—М–љ—Л–µ –Њ—В –Ь–Є–љ—Б–Ї–Њ–≥–Њ –Ј–∞–≤–Њ–і–∞ –њ–Њ 1$)
— 0,93$
— 2,87$
2 —И—В. — 2,15$
3 —И—В. — 1,62$
–Ш—В–Њ–≥–Њ –њ–Њ –Ј–∞–њ—З–∞—Б—В—П–Љ ~85$
–Ъ–Њ—А–њ—Г—Б — 5$
PLA –њ–ї–∞—Б—В–Є–Ї — –Љ–∞–Ї—Б–Є–Љ—Г–Љ –љ–∞ 10$
–Я–Њ—Б–Ї–Њ–ї—М–Ї—Г –≤ –Љ–∞–≥–∞–Ј–Є–љ–∞—Е , –Є –і—А—Г–≥–Є—Е –њ–ї–∞—В–љ–∞—П –і–Њ—Б—В–∞–≤–Ї–∞, –∞ —В–∞–Ї –ґ–µ –Љ–Њ–ґ–µ—В –Ї–∞–Ї—Г—О –Љ–µ–ї–Њ—З–µ–≤–Ї—Г –Ј–∞–±—Л–ї —Г–Ї–∞–Ј–∞—В—М, —В–Њ –і–Њ–±–∞–≤–Є–Љ 15$.
–Ш—В–Њ–≥–Њ 115$
–Ґ–∞–Ї –ґ–µ –њ—А–Њ—И—Г —Г—З–µ—Б—В—М, —З—В–Њ –≤—Л—И–µ–њ—А–Є–≤–µ–і–µ–љ–љ—Л–µ —Ж–µ–љ—Л –њ—А–Є–±–ї–Є–Ј–Є—В–µ–ї—М–љ—Л, –Љ–Њ–ґ–љ–Њ –љ–∞–є—В–Є –і–µ—И–µ–≤–ї–µ, –љ–∞–њ—А–∞–≤–ї—П—О—Й–Є–µ –Љ–Њ–ґ–љ–Њ –Є–Ј—К—П—В—М –Є–Ј —Б—В–∞—А–Њ–є —В–µ—Е–љ–Є–Ї–Є, —Н–ї–µ–Ї—В—А–Њ–љ–Є–Ї—Г –Ї—Г–њ–Є—В—М –≤ –Љ–∞–≥–∞–Ј–Є–љ–∞—Е —Б–њ–µ—Ж–Є–∞–ї–Є–Ј–Є—А—Г—О—Й–Є—Е—Б—П –љ–∞ —Н—В–Њ–Љ.
–Я–ї–∞–љ—Л –љ–∞ –±—Г–і—Г—Й–µ–µ:
–Т—Б–µ —В–∞–Ї–Є —Б–і–µ–ї–∞—В—М –њ–Њ–і–Њ–≥—А–µ–≤ —Б—В–Њ–ї–∞ — –Ї—Г–њ–ї–µ–љ–∞ —Б–Є–ї–Є–Ї–Њ–љ–Њ–≤–∞—П –≥—А–µ–ї–Ї–∞ –љ–∞ 220–Т 100–Т—В –Є —В–≤–µ—А–і–Њ—В–µ–ї—М–љ–Њ–µ —А–µ–ї–µ;
–°–њ—А–Њ–µ–Ї—В–Є—А–Њ–≤–∞—В—М –Є –љ–∞–њ–µ—З–∞—В–∞—В—М –Ї–∞–±–µ–ї—М-–Ї–∞–љ–∞–ї—Л –Є —Б–њ—А—П—В–∞—В—М –њ—А–Њ–≤–Њ–і–∞;
–Э–∞ –Њ—Б–Є Z –њ–Њ–Љ–µ–љ—П—В—М —И–њ–Є–ї—М–Ї—Г –Ь8 –љ–∞ —В—А–∞–њ–µ—Ж–µ–Є–і–∞–ї—М–љ—Л–є –≤–Є–љ—В — –Ї—Г–њ–ї–µ–љ;
–°–њ—А–Њ–µ–Ї—В–Є—А–Њ–≤–∞—В—М —А–∞–і–Є–∞–ї—М–љ–є –Њ–±–і—Г–≤ –њ–µ—З–∞—В–∞–µ–Љ–Њ–є –і–µ—В–∞–ї–Є.
–Я—А–Є–Ї—А—Г—В–Є—В—М Octoprint — —Г–ґ–µ –µ—Б—В—М, —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ –љ–∞ OrangePi Zero, –Њ—Б—В–∞–ї–Њ—Б—М –њ–Њ–і–∞—В—М –њ–Є—В–∞–љ–Є–µ.
–Ч–∞ —Б–Є–Љ —А–∞–Ј—А–µ—И–Є—В–µ –Њ—В–Ї–ї–∞–љ—П—В—М—Б—П,
–°–њ–∞—Б–Є–±–Њ –Ј–∞ –≤–љ–Є–Љ–∞–љ–Є–µ.
–° –Ї—А–Є—В–Є–Ї–Њ–є, –њ–Њ–ґ–µ–ї–∞–љ–Є—П–Љ–Є –Є –≤–Њ–њ—А–Њ—Б–∞–Љ–Є — –њ—А–Њ—И—Г –≤ –Ї–Њ–Љ–Љ–µ–љ—В–∞—А–Є–Є.
P.S. –Т—Б–µ —В–∞–Ї–Є —З—Г–Ї—З–∞ —З–Є—В–∞—В–µ–ї—М, –∞ –љ–µ –њ–Є—Б–∞—В–µ–ї—М.
–∞–≤—В–Њ—А: Berserker_s |