–Ш–љ—В–µ—А–µ—Б–љ–Њ–µ –њ—А–µ–і–ї–Њ–ґ–µ–љ–Є–µ
–Т—Е–Њ–і
–°—В–∞—В–Є—Б—В–Є–Ї–∞


| –†—Г—Б—Б–Ї–∞—П –Є–љ—Б—В—А—Г–Ї—Ж–Є—П –і–ї—П Math3 |
| –°–Њ—Д—В –і–ї—П –І–Я–£ –Є 3D –њ—А–Є–љ—В–µ—А–Њ–≤ |
|
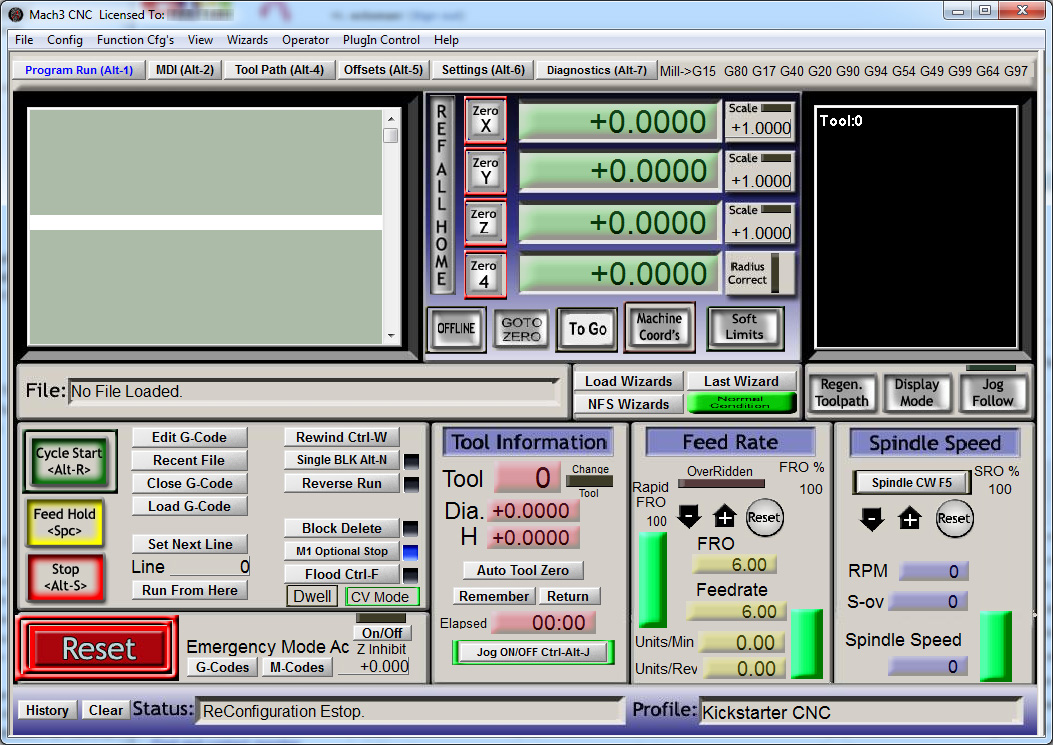
–Я—А–Њ–≥—А–∞–Љ–Љ–∞ Mach3 - —Н—В–Њ —Д–∞–Ї—В–Є—З–µ—Б–Ї–Є –і—А–∞–є–≤–µ—А –Ї–Њ—В–Њ—А—Л–є –њ—А–µ–≤—А–∞—Й–∞–µ—В –≤–∞—И –љ–Њ—Г—В–±—Г–Ї –Є–ї–Є –њ–µ—А—Б–Њ–љ–∞–ї—М–љ—Л–є –Ї–Њ–Љ–њ—М—О—В–µ—А –≤ —Б—В–∞–љ—Ж–Є—О —Г–њ—А–∞–≤–ї–µ–љ–Є—П –І–Я–£ —Б—В–∞–љ–Ї–Њ–Љ.
–Я—А–Є —Н—В–Њ–Љ —В–Є–њ –І–Я–£ —Б—В–∞–љ–Ї–∞ –љ–µ –Є–≥—А–∞–µ—В —А–Њ–ї–Є, —Н—В–Њ –Љ–Њ–ґ–µ—В –±—Л—В—М —Д—А–µ–Ј–µ—А–љ—Л–є –Є–ї–Є —В–Њ–Ї–∞—А–љ—Л–є, –ї–∞–Ј–µ—А–љ–Њ-–≥—А–∞–≤–Є—А–Њ–≤–∞–ї—М–љ—Л–є –Є–ї–Є —Б—В–∞–љ–Њ–Ї –њ–ї–∞–Ј–Љ–µ–љ–љ–Њ–є —А–µ–Ј–Ї–Є - –і–ї—П –і–ї—П¬†Mach3 –љ–µ—В —А–∞–Ј–љ–Є—Ж—Л —З–µ–Љ –Є–Љ–µ–љ–љ–Њ —Г–њ—А–∞–≤–ї—П—В—М. –°—В–Њ–Є—В –Њ—В–Љ–µ—В–Є—В—М —В–Њ, —З—В–Њ –њ–∞–Ї–µ—В –Я–Ю Mach3 –њ—А–µ–Ї—А–∞—Б–љ–Њ –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –Ї–∞–Ї –љ–∞ –њ—А–Њ—Д–µ—Б—Б–Є–Њ–љ–∞–ї—М–љ–Њ–Љ –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–Є–Є, —В–∞–Ї –Є –љ–∞ —Б–∞–Љ–Њ–і–µ–ї—М–љ—Л—Е –І–Я–£ —Б—В–∞–љ–Ї–∞—Е. –Т –њ—А–Њ–і–Њ–ї–ґ–µ–љ–Є–Є —Б—В–∞—В—М–Є –≤—Л –Љ–Њ–ґ–µ—В–µ —Б–Ї–∞—З–∞—В—М –Є–љ—Б—В—А—Г–Ї—Ж–Є—О –љ–∞ —А—Г—Б—Б–Ї–Њ–Љ —П–Ј—Л–Ї–µ –і–ї—П Mach3.
¬† –°—В–Њ–Є—В –Ј–∞–Љ–µ—В–Є—В—М - –њ—А–Њ–≥—А–∞–Љ–Љ–∞¬†Mach3 –і–µ–ї–Є—В —А—Л–љ–Њ–Ї –і–Њ–Љ–∞—И–љ–Є—Е –І–Я–£ —Б—В–∞–љ–Ї–Њ–≤ —Б LinuxCNC, –љ–Њ –≤ –Њ—В–ї–Є—З–Є–Є –Њ—В –њ–Њ—Б–ї–µ–і–љ–µ–≥–Њ –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В Windows –Є –≤–∞–Љ –љ–µ –њ—А–Є–Є–і–µ—В—Б—П –њ–µ—А–µ—Г—З–Є–≤–∞—В—М—Б—П –і–ї—П —А–∞–±–Њ—В—Л —Б —Н—В–Њ–є –њ—А–Њ–≥—А–∞–Љ–Љ–Њ–є.
–Т –Ї–Њ–љ—Ж–µ —Б—В–∞—В—М–Є —А–∞—Б–њ–Њ–ї–∞–≥–∞–µ—В—Б—П —Б—Б—Л–ї–Ї–∞ –љ–∞ —А—Г—Б—Б–Ї—Г—О –Є–љ—Б—В—А—Г–Ї—Ж–Є—О –і–ї—П¬†Mach3, –∞ –љ–Є–ґ–µ –≤—Л –Љ–Њ–ґ–µ—В–µ –Њ–Ј–љ–∞–Ї–Њ–Љ–Є—В—М—Б—П —Б –Њ–≥–ї–∞–≤–ї–µ–љ–Є–µ–Љ –і–∞–љ–љ–Њ–є –Є–љ—Б—В—А—Г–Ї—Ж–Є–Є. 1. ¬†–Я—А–µ–і–Є—Б–ї–Њ–≤–Є–µ 2. ¬†–Т–≤–µ–і–µ–љ–Є–µ –≤ CNC 2.1 ¬†–Ъ–Њ–Љ–њ–ї–µ–Ї—В—Г—О—Й–Є–µ —Б–Є—Б—В–µ–Љ—Л 2.2 ¬†–Т–Ј–∞–Є–Љ–Њ–і–µ–є—Б—В–≤–Є–µ —Б Mach2 3. ¬†–Ю–±–Ј–Њ—А –њ—А–Њ–≥—А–∞–Љ–Љ—Л Mach2 3.1 ¬†–£—Б—В–∞–љ–Њ–≤–Ї–∞ 3.1.1 ¬†–°–Ї–∞—З–Є–≤–∞–љ–Є–µ 3.1.2 ¬†–£—Б—В–∞–љ–Њ–≤–Ї–∞ 3.1.3 ¬†–Ю–±—П–Ј–∞—В–µ–ї—М–љ–∞—П –њ–µ—А–µ–Ј–∞–≥—А—Г–Ј–Ї–∞ 3.1.4 ¬†–Ш–Ї–Њ–љ–Ї–Є —А–∞–±–Њ—З–µ–≥–Њ —Б—В–Њ–ї–∞ 3.1.5 ¬†–Ґ–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–µ —Г—Б—В–∞–љ–Њ–≤–Ї–Є 3.1.6 ¬†–Ґ–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–µ OCX –≤ —Б–ї—Г—З–∞–µ –љ–µ–Ї–Њ—А—А–µ–Ї—В–љ–Њ–є —А–∞–±–Њ—В—Л Mach2 3.1.7 ¬†–£—Б—В–∞–љ–Њ–≤–Ї–∞ –Є —Г–і–∞–ї–µ–љ–Є–µ –і—А–∞–є–≤–µ—А–∞ –≤—А—Г—З–љ—Г—О 3.2 ¬†–Ю–Ї–љ–∞ –њ—А–Њ–≥—А–∞–Љ–Љ—Л 3.2.1 ¬†–Ґ–Є–њ—Л –Њ–±—К–µ–Ї—В–Њ–≤ 3.2.2 ¬†–Ш—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ –Ї–љ–Њ–њ–Њ–Ї –Є –Є–Ї–Њ–љ–Њ–Ї 3.2.3 ¬†–Т–≤–Њ–і –і–∞–љ–љ—Л—Е –≤ –њ–Њ–ї—П 3.3 ¬†–Я—А–Њ–≥–Њ–љ 3.4 ¬†–†—Г—З–љ–Њ–є –≤–≤–Њ–і –і–∞–љ–љ—Л—Е (MDI) –Є –Њ–±—Г—З–µ–љ–Є–µ 3.4.1 ¬†MDI 3.4.2 ¬†–Ю–±—Г—З–µ–љ–Є–µ 3.5 ¬†–Ь–∞—Б—В–µ—А–∞ вАУ CAM –±–µ–Ј —Б–њ–µ—Ж–Є–∞–ї—М–љ—Л—Е CAM –њ—А–Њ–≥—А–∞–Љ–Љ 3.6 ¬†–Ш—Б–њ–Њ–ї–љ–µ–љ–Є–µ G-–Ї–Њ–і–∞ 3.7 ¬†–≠–Ї—А–∞–љ –Њ—В–Њ–±—А–∞–ґ–µ–љ–Є—П –њ—Г—В–Є 3.7.1 ¬†–Я—А–Њ—Б–Љ–Њ—В—А –њ—Г—В–Є 3.7.2 ¬†–Я–µ—А–µ–Љ–µ—Й–µ–љ–Є–µ –Є –њ—А–Є–±–ї–Є–ґ–µ–љ–Є–µ 3.8 ¬†–Ф—А—Г–≥–Є–µ —Б–≤–Њ–є—Б—В–≤–∞ —Н–Ї—А–∞–љ–∞ 4. ¬†–Р–њ–њ–∞—А–∞—В–љ—Л–µ —Б—А–µ–і—Б—В–≤–∞ –Є –њ–Њ–і–Ї–ї—О—З–µ–љ–Є–µ —Б—В–∞–љ–Ї–∞ 4.1 ¬†–С–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В—М вАУ –Т–Р–Ц–Э–Ю! 4.2 ¬†–І—В–Њ Mach2 –Љ–Њ–ґ–µ—В –Ї–Њ–љ—В—А–Њ–ї–Є—А–Њ–≤–∞—В—М 4.3 ¬†–£–њ—А–∞–≤–ї–µ–љ–Є–µ EStop 4.4 ¬†–Я–∞—А–∞–ї–ї–µ–ї—М–љ—Л–є –њ–Њ—А—В –Ї–Њ–Љ–њ—М—О—В–µ—А–∞ 4.4.1 ¬†–Я–∞—А–∞–ї–ї–µ–ї—М–љ—Л–є –њ–Њ—А—В –Є –µ–≥–Њ –Є—Б—В–Њ—А–Є—П 4.4.2 ¬†–Ы–Њ–≥–Є—З–µ—Б–Ї–Є–µ —Б–Є–≥–љ–∞–ї—Л 4.4.3 ¬†–≠–ї–µ–Ї—В—А–Є—З–µ—Б–Ї–Є–µ –њ–Њ–Љ–µ—Е–Є 4.5 ¬†–Ю–њ—Ж–Є–Є —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Њ—Б—П–Љ–Є 4.5.1 ¬†–®–∞–≥–Њ–≤—Л–µ –Є —Б–µ—А–≤–Њ–і–≤–Є–≥–∞—В–µ–ї–Є 4.5.2 ¬†–†–∞—Б—З–µ—В –Њ—Б–µ–є 4.5.3 ¬†–Ъ–∞–Ї —А–∞–±–Њ—В–∞—О—В Step –Є Dir —Б–Є–≥–љ–∞–ї—Л 4.6 ¬†–Я–µ—А–µ–Ї–ї—О—З–∞—В–µ–ї–Є Limit –Є Home 4.6.1 ¬†–°—В—А–∞—В–µ–≥–Є—П 4.6.2 ¬†–Я–µ—А–µ–Ї–ї—О—З–∞—В–µ–ї–Є 4.6.3 ¬†–У–і–µ —А–∞—Б–њ–Њ–ї–∞–≥–∞—В—М –њ–µ—А–µ–Ї–ї—О—З–∞—В–µ–ї–Є 4.6.4 ¬†–Ъ–∞–Ї Mach2 –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В –Њ–±—Й–Є–µ –њ–µ—А–µ–Ї–ї—О—З–∞—В–µ–ї–Є 4.6.5 ¬†–Я–µ—А–µ–∞–і—А–µ—Б–∞—Ж–Є—П –≤ –і–µ–є—Б—В–≤–Є–Є 4.6.6 ¬†–Ф—А—Г–≥–Є–µ –Њ–њ—Ж–Є–Є –Є –њ–Њ–і—Б–Ї–∞–Ј–Ї–Є –њ–Њ Home –Є Limit 4.7 ¬†–£–њ—А–∞–≤–ї–µ–љ–Є–µ —И–њ–Є–љ–і–µ–ї–µ–Љ 4.8 ¬†–Ю—Е–ї–∞–ґ–і–µ–љ–Є–µ 4.9 ¬†–£–њ—А–∞–≤–ї–µ–љ–Є–µ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–µ–Љ –љ–Њ–ґ–µ–є 4.10 ¬†–Я—А–Њ–≤–µ—А–Ї–∞ –Њ—Ж–Є—Д—А–Њ–≤–Ї–Є 4.11 ¬†–Ы–Є–љ–µ–є–љ—Л–µ (–Њ–њ—В–Є—З–µ—Б–Ї–∞—П —И–Ї–∞–ї–∞) –Ї–Њ–і–Є—А—Г—О—Й–Є–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ 4.12 ¬†–Э–∞—З–∞–ї—М–љ—Л–є –Є–Љ–њ—Г–ї—М—Б —И–њ–Є–љ–і–µ–ї—П 4.13 ¬†Charge pump - a pulse monitor 4.14 ¬†–Ф—А—Г–≥–Є–µ —Д—Г–љ–Ї—Ж–Є–Є 5. –Э–∞—Б—В—А–Њ–є–Ї–∞ Mach3 –њ–Њ–і –≤–∞—И —Б—В–∞–љ–Њ–ЇвА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶ 5.1 ¬†–°—В—А–∞—В–µ–≥–Є—П –љ–∞—Б—В—А–Њ–є–Ї–Є 5.2 ¬†–Э–∞—З–∞–ї—М–љ–∞—П –љ–∞—Б—В—А–Њ–є–Ї–∞ 5.2.1 ¬†–Ю–њ—А–µ–і–µ–ї–µ–љ–Є–µ –∞–і—А–µ—Б–Њ–≤ –Є—Б–њ–Њ–ї—М–Ј—Г–µ–Љ—Л—Е –њ–Њ—А—В–Њ–≤ 5.2.2 –Ю–њ—А–µ–і–µ–ї–µ–љ–Є–µ —З–∞—Б—В–Њ—В—Л –і–≤–Є–≥–∞—В–µ–ї—ПвА¶ 5.2.3 –Ю–њ—А–µ–і–µ–ї–µ–љ–Є–µ —Б–њ–µ—Ж–Є–∞–ї—М–љ—Л—Е –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–µ–є 5.3 –Ю–њ—А–µ–і–µ–ї–µ–љ–Є–µ –Є—Б–њ–Њ–ї—М–Ј—Г–µ–Љ—Л—Е —Б–Є–≥–љ–∞–ї–Њ–≤ –≤–≤–Њ–і–∞ –Є –≤—Л–≤–Њ–і–∞ 5.3.1 –Ш—Б–њ–Њ–ї—М–Ј—Г–µ–Љ—Л–µ –і–ї—П –Њ—Б–µ–є –Є —И–њ–Є–љ–і–µ–ї—П —Б–Є–≥–љ–∞–ї—Л –≤—Л–≤–Њ–і–∞ 5.3.2 –Ш—Б–њ–Њ–ї—М–Ј—Г–µ–Љ—Л–µ —Б–Є–≥–љ–∞–ї—Л –≤–≤–Њ–і–∞ 5.3.3 –≠–Љ—Г–ї–Є—А—Г–µ–Љ—Л–µ —Б–Є–≥–љ–∞–ї—Л –≤–≤–Њ–і–∞ 5.3.4 –°–Є–≥–љ–∞–ї—Л –≤—Л–≤–Њ–і–∞ 5.3.5 –Ю–њ—А–µ–і–µ–ї–µ–љ–Є–µ –≤–≤–Њ–і–Њ–≤ —Н–љ–Ї–Њ–і–µ—А–∞ 5.3.5.1 –≠–љ–Ї–Њ–і–µ—А—ЛвА¶ 5.3.5.2 MPGs 5.3.6 –Э–∞—Б—В—А–Њ–є–Ї–∞ —И–њ–Є–љ–і–µ–ї—П 5.3.6.1 –£–њ—А–∞–≤–ї–µ–љ–Є–µ –Њ—Е–ї–∞–ґ–і–µ–љ–Є–µ–Љ 5.3.6.2 –£–њ—А–∞–≤–ї–µ–љ–Є–µ —А–µ–ї–µ —И–њ–Є–љ–і–µ–ї—П 5.3.6.3 –£–њ—А–∞–≤–ї–µ–љ–Є–µ –і–≤–Є–≥–∞—В–µ–ї–µ–Љ 5.3.6.4 –£–њ—А–∞–≤–ї–µ–љ–Є–µ —И–њ–Є–љ–і–µ–ї–µ–Љ Mod-bus 5.3.6.5 –Ю–±—Й–Є–µ –љ–∞—Б—В—А–Њ–є–Ї–Є 5.3.6.6 Pulley ratios 5.3.6.7 –°–њ–µ—Ж–Є–∞–ї—М–љ—Л–µ —Д—Г–љ–Ї—Ж–Є–Є 5.3.7 –Э–∞—Б—В—А–Њ–є–Ї–Є —Д—А–µ–Ј—Л 5.3.8 –Ґ–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–µ 5.4 –Ю–њ—А–µ–і–µ–ї–µ–љ–Є–µ –Є—Б–њ–Њ–ї—М–Ј—Г–µ–Љ—Л—Е –µ–і–Є–љ–Є—Ж 5.5 –Э–∞—Б—В—А–Њ–є–Ї–∞ –і–≤–Є–≥–∞—В–µ–ї–µ–є 5.5.1 –Т—Л—З–Є—Б–ї–µ–љ–Є–µ —И–∞–≥–Њ–≤ –љ–∞ –µ–і–Є–љ–Є—Ж—Г 5.5.1.1 –Ю–±—Б—З–µ—В –Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї–Њ–≥–Њ –њ—А–Є–≤–Њ–і–∞ 5.5.1.2 –Т—Л—З–Є—Б–ї–µ–љ–Є–µ —И–∞–≥–Њ–≤ –і–≤–Є–≥–∞—В–µ–ї—П –љ–∞ revolution 5.5.1.3 –Т—Л—З–Є—Б–ї–µ–љ–Є–µ —И–∞–≥–Њ–≤ Mach3 –љ–∞ revolution вА¶вА¶вА¶ 5.5.1.4 –Ъ–Њ–ї–Є—З–µ—Б—В–≤–Њ —И–∞–≥–Њ–≤ Mach3 –љ–∞ –µ–і–Є–љ–Є—Ж—Г 5.5.2 –£—Б—В–∞–љ–Њ–≤–Ї–∞ –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –і–≤–Є–≥–∞—В–µ–ї—П 5.5.2.1 –Я—А–∞–Ї—В–Є—З–µ—Б–Ї–Є–µ –Є—Б–њ—Л—В–∞–љ–Є—П —Б–Ї–Њ—А–Њ—Б—В–Є –і–≤–Є–≥–∞—В–µ–ї—П 5.5.2.2 –Т—Л—З–Є—Б–ї–µ–љ–Є–µ –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –і–≤–Є–≥–∞—В–µ–ї—ПвА¶вА¶ 5.5.2.3 –Р–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–∞—П —Г—Б—В–∞–љ–Њ–≤–Ї–∞ –Ї–Њ–ї–Є—З–µ—Б—В–≤–∞ —И–∞–≥–Њ–≤ –љ–∞ –µ–і–Є–љ–Є—Ж—Г 5.5.3 –Т—Л–±–Њ—А —Г—Б–Ї–Њ—А–µ–љ–Є—ПвА¶вА¶вА¶ 5.5.3.1 –Ш–љ–µ—А—Ж–Є—П –Є —Б–Є–ї—ЛвА¶вА¶ 5.5.3.2 –Ґ–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–µ —А–∞–Ј–љ—Л—Е –Ј–љ–∞—З–µ–љ–Є–є —Г—Б–Ї–Њ—А–µ–љ–Є—П 5.5.3.3 –Я–Њ—З–µ–Љ—Г —Б–ї–µ–і—Г–µ—В –Є–Ј–±–µ–≥–∞—В—М —Б–µ—А—М–µ–Ј–љ—Л—Е –Њ—И–Є–±–Њ–Ї —Б–µ—А–≤–Њ–і–≤–Є–≥–∞—В–µ–ї—П 5.5.3.4 –Т—Л–±–Њ—А –Ј–љ–∞—З–µ–љ–Є—П —Г—Б–Ї–Њ—А–µ–љ–Є—ПвА¶вА¶вА¶ 5.5.4 –°–Њ—Е—А–∞–љ–µ–љ–Є–µ –Є —В–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–µ –Њ—Б–µ–є 5.5.5 –Я–Њ–≤—В–Њ—А –љ–∞—Б—В—А–Њ–є–Ї–Є –і—А—Г–≥–Є—Е –Њ—Б–µ–євА¶ 5.5.6 –£—Б—В–∞–љ–Њ–≤–Ї–∞ –і–≤–Є–≥–∞—В–µ–ї—П —И–њ–Є–љ–і–µ–ї—П 5.5.6.1 –°–Ї–Њ—А–Њ—Б—В—М –і–≤–Є–≥–∞—В–µ–ї—П, —Б–Ї–Њ—А–Њ—Б—В—М —И–њ–Є–љ–і–µ–ї—П –Є pulleys 5.5.6.2 –®–Є—А–Є–љ–∞ –Є–Љ–њ—Г–ї—М—Б–∞ modulated –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞ —И–њ–Є–љ–і–µ–ї—П 5.5.6.3 –Ъ–Њ–љ—В—А–Њ–ї–ї–µ—А —И–∞–≥–∞ –Є –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П —И–њ–Є–љ–і–µ–ї—П 5.5.6.4 –Я—А–Њ–≤–µ—А–Ї–∞ –њ—А–Є–≤–Њ–і–∞ —И–њ–Є–љ–і–µ–ї—П 5.6 –Ф—А—Г–≥–Є–µ –љ–∞—Б—В—А–Њ–є–Ї–ЄвА¶ 5.6.1 –Э–∞—Б—В—А–Њ–є–Ї–∞ –љ–∞—З–∞–ї—М–љ–Њ–≥–Њ –њ–Њ–ї–Њ–ґ–µ–љ–Є—П –Є –њ—А–Њ–≥—А–∞–Љ–Љ–љ—Л—Е –Њ–≥—А–∞–љ–Є—З–µ–љ–Є–є 5.6.1.1 Referencing —Б–Ї–Њ—А–Њ—Б—В–µ–є –Є –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–є 5.6.1.2 –Э–∞—З–∞–ї—М–љ–Њ–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –њ–µ—А–µ–Ї–ї—О—З–∞—В–µ–ї–µ–є 5.6.1.3 –Э–∞—Б—В—А–Њ–є–Ї–∞ –Њ–≥—А–∞–љ–Є—З–µ–љ–Є–є –њ—А–Њ–≥—А–∞–Љ–Љ—Л 5.6.1.4 –Э–∞—З–∞–ї—М–љ–Њ–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ G28 5.6.2 –Э–∞—Б—В—А–Њ–є–Ї–∞ –≥–Њ—А—П—З–Є—Е –Ї–ї–∞–≤–Є—И 5.6.3 –Э–∞—Б—В—А–Њ–є–Ї–∞ –Њ–±—А–∞—В–љ–Њ–є —А–µ–∞–Ї—Ж–Є–Є 5.6.4 –Э–∞—Б—В—А–Њ–є–Ї–∞ –њ–Њ–і—З–Є–љ–µ–љ–љ–Њ—Б—В–Є 5.6.5 –Э–∞—Б—В—А–Њ–є–Ї–∞ –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ –њ—Г—В–Є 5.6.6 –Э–∞—Б—В—А–Њ–є–Ї–∞ –љ–∞—З–∞–ї—М–љ–Њ–≥–Њ —Б–Њ—Б—В–Њ—П–љ–Є—П 5.6.7 –Э–∞—Б—В—А–Њ–є–Ї–∞ –і—А—Г–≥–Є—Е –ї–Њ–≥–Є—З–µ—Б–Ї–Є—Е –њ—Г–љ–Ї—В–Њ–≤ 5.7 –Ъ–∞–Ї —Е—А–∞–љ–Є—В—Б—П –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—П –Њ –њ—А–Њ—Д–Є–ї–µ 6. –£–њ—А–∞–≤–ї–µ–љ–Є–µ Mach3 –Є –Ј–∞–њ—Г—Б–Ї –њ–Њ–і–њ—А–Њ–≥—А–∞–Љ–Љ—ЛвА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶ 6.1 –Т—Б—В—Г–њ–ї–µ–љ–Є–µвА¶ 6.2 –Ъ–∞–Ї —А–∞—Б—Б–Ї–∞–Ј—Л–≤–∞–µ—В—Б—П –Њ–± —Г–њ—А–∞–≤–ї–µ–љ–Є–Є –≤ —Н—В–Њ–Љ —А–∞–Ј–і–µ–ї–µ 6.2.1 –£–њ—А–∞–≤–ї–µ–љ–Є–µ –њ–µ—А–µ–Ї–ї—О—З–µ–љ–Є–µ–Љ —Н–Ї—А–∞–љ–Њ–≤ 6.2.1.1 –°–±—А–Њ—БвА¶вА¶ 6.2.1.2 –ѓ—А–ї—Л–Ї–ЄвА¶ 6.2.1.3 –Ъ–љ–Њ–њ–Ї–Є –≤—Л–±–Њ—А–∞ —Н–Ї—А–∞–љ–∞вА¶вА¶ 6.2.2 –У—А—Г–њ–њ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Њ—Б—П–Љ–Є 6.2.2.1 DRO –Ј–љ–∞—З–µ–љ–Є—П –Ї–Њ–Њ—А–і–Є–љ–∞—В—Л 6.2.2.2 Referenced 6.2.2.3 –Ъ–Њ–Њ—А–і–Є–љ–∞—В—Л —Б—В–∞–љ–Ї–∞ 6.2.2.4 –®–Ї–∞–ї–∞ 6.2.2.5 –Я—А–Њ–≥—А–∞–Љ–Љ–љ—Л–µ –Њ–≥—А–∞–љ–Є—З–µ–љ–Є—П 6.2.2.6 –Я—А–Њ–≤–µ—А–Ї–∞ 6.2.2.7 –Ъ–Њ—А—А–µ–Ї—Ж–Є—П –Ф–Є–∞–Љ–µ—В—А–∞/–†–∞–і–Є—Г—Б–∞ 6.2.3 –≠–ї–µ–Љ–µ–љ—В —Г–њ—А–∞–≤–ї–µ–љ–Є—П ¬Ђ–Ф–≤–Є–≥–∞—В—М—Б—П –Ї¬ї 6.2.4 –У—А—Г–њ–њ–∞ MDI –Є —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Њ–±—Г—З–µ–љ–Є–µ–Љ 6.2.5 –У—А—Г–њ–њ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –њ—А–Њ–≥–Њ–љ–Њ–Љ 6.2.5.1 –У–Њ—А—П—З–Є–µ –Ї–ї–∞–≤–Є—И–Є –њ—А–Њ–≥–Њ–љ–∞ 6.2.5.2 –Я—А–Њ–≥–Њ–љ —З–µ—А–µ–Ј –њ–∞—А–∞–ї–ї–µ–ї—М–љ—Л–є –њ–Њ—А—В –Є–ї–Є Modbus MPG 6.2.5.3 –У—А—Г–њ–њ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Б–Ї–Њ—А–Њ—Б—В—М—О —И–њ–Є–љ–і–µ–ї—П 6.2.6 –У—А—Г–њ–њ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –њ–Њ–і–∞—З–µ–є 6.2.6.1 –Ъ–Њ–ї–Є—З–µ—Б—В–≤–Њ –µ–і–Є–љ–Є—Ж –њ–Њ–і–∞—З–Є –Ј–∞ –Љ–Є–љ—Г—В—Г 6.2.6.2 –Ъ–Њ–ї–Є—З–µ—Б—В–≤–Њ –µ–і–Є–љ–Є—Ж –њ–Њ–і–∞—З–Є –Ј–∞ ¬†rev 6.2.6.3 –Ф–Є—Б–њ–ї–µ–є –њ–Њ–і–∞—З–Є 6.2.6.4 –Ю–±—Е–Њ–і –њ–Њ–і–∞—З–ЄвА¶ 6.2.7 –У—А—Г–њ–њ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Ј–∞–њ—Г—Б–Ї–Њ–Љ –њ—А–Њ–≥—А–∞–Љ–Љ—Л 6.2.7.1 –Ч–∞–њ—Г—Б–Ї —Ж–Є–Ї–ї–∞вА¶ 6.2.7.2 –Ч–∞–і–µ—А–ґ–Ї–∞ –њ–Њ–і–∞—З–Є 6.2.7.3 –Ю—Б—В–∞–љ–Њ–≤–Ї–∞ 6.2.7.4 –Я—А–Њ–Ї—А—Г—В–Ї–∞ –љ–∞–Ј–∞–і 6.2.7.5 –Ю–і–Є–љ–Њ—З–љ—Л–є BLK 6.2.7.6 –Ю–±—А–∞—В–љ—Л–є –Ј–∞–њ—Г—Б–Ї 6.2.7.7 –Э–Њ–Љ–µ—А —Б—В—А–Њ–Ї–Є 6.2.7.8 –Ч–∞–њ—Г—Б–Ї —Б —В–µ–Ї—Г—Й–µ–≥–Њ –Љ–µ—Б—В–∞ 6.2.7.9 –Ч–∞–і–∞—В—М —Б–ї–µ–і—Г—О—Й—Г—О —Б—В—А–Њ–Ї—Г 6.2.7.10 –°—В–µ—А–µ—В—М –±–ї–Њ–ЇвА¶ 6.2.7.11 –Я—А–Њ–Є–Ј–≤–Њ–ї—М–љ–∞—П –Њ—Б—В–∞–љ–Њ–≤–Ї–∞ 6.2.8 –У—А—Г–њ–њ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Д–∞–є–ї–Њ–Љ 6.2.9 –Я–Њ–і—А–Њ–±–љ–Њ—Б—В–Є –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ 6.2.10 –У—А—Г–њ–њ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П G-–Ї–Њ–і–Њ–Љ –Є –Є–љ—Б—В—А—Г–Љ–µ–љ—В–Њ–Љ –њ—Г—В–Є 6.2.11 –У—А—Г–њ–њ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —А–∞–±–Њ—З–Є–Љ –Њ—В—Б—В—Г–њ–Њ–Љ –Є —А–∞–±–Њ—З–µ–є –Њ–±–ї–∞—Б—В—М—О 6.2.11.1 –†–∞–±–Њ—З–Є–µ –Њ—В—Б—В—Г–њ—Л 6.2.11.2 –Ш–љ—Б—В—А—Г–Љ–µ–љ—В—Л 6.2.11.3 –Я—А—П–Љ–Њ–є –і–Њ—Б—В—Г–њ –Ї —В–∞–±–ї–Є—Ж–µ –Њ—В—Б—В—Г–њ–Њ–≤ 6.2.12 –У—А—Г–њ–њ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –і–Є–∞–Љ–µ—В—А–Њ–Љ –≤—А–∞—Й–µ–љ–Є—П 6.2.13 –У—А—Г–њ–њ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —В–∞–љ–≥–µ–љ—Б–Њ–Є–і–Њ–євА¶ 6.2.14 –У—А—Г–њ–њ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Њ–≥—А–∞–љ–Є—З–µ–љ–Є—П–Љ–Є –Є –і—А—Г–≥–Є–µ –љ–∞—Б—В—А–Њ–є–Ї–Є 6.2.14.1 –Р–Ї—В–Є–≤–∞—Ж–Є—П –≤–≤–Њ–і–∞ 4вА¶ 6.2.14.2 –Ю–≥—А–∞–љ–Є—З–µ–љ–Є—П –Њ–±—Е–Њ–і–∞ 6.2.15 –У—А—Г–њ–њ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Б–Є—Б—В–µ–Љ–љ—Л–Љ–Є –љ–∞—Б—В—А–Њ–є–Ї–∞–Љ–Є 6.2.15.1 –Х–і–Є–љ–Є—Ж—Л 6.2.15.2 –С–µ–Ј–Њ–њ–∞—Б–љ–∞—П Z 6.2.15.3 CV —А–µ–ґ–Є–Љ/–Њ–≥—А–∞–љ–Є—З–µ–љ–Є—П —Г–≥–ї–∞ 6.2.15.4 –Э–µ –≤ —Б–µ—В–ЄвА¶ 6.2.16 –У—А—Г–њ–њ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Н–љ–Ї–Њ–і–µ—А–∞–Љ–Є 6.2.17 –У—А—Г–њ–њ–∞ –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Њ–≥–Њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П Z 6.2.18 –У—А—Г–њ–њ–∞ –≤—Л–≤–Њ–і–Њ–≤ –Ы–∞–Ј–µ—А–љ–Њ–≥–Њ –Ґ—А–Є–≥–≥–µ—А–∞вА¶ 6.2.19 –У—А—Г–њ–њ–∞ —Б–Њ–±—Б—В–≤–µ–љ–љ—Л—Е –љ–∞—Б—В—А–Њ–µ–Ї 6.3 –Ш—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ –Љ–∞—Б—В–µ—А–Њ–≤ 6.4 –Ч–∞–≥—А—Г–Ј–Ї–∞ –њ–Њ–і–њ—А–Њ–≥—А–∞–Љ–Љ—Л –љ–∞ G-–Ї–Њ–і–∞—ЕвА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶ 6-15 6.5 –†–µ–і–∞–Ї—В–Є—А–Њ–≤–∞–љ–Є–µ –њ–Њ–і–њ—А–Њ–≥—А–∞–Љ–Љ—Л 6.6 –†—Г—З–љ–∞—П –њ–Њ–і–≥–Њ—В–Њ–≤–Ї–∞ –Є –Ј–∞–њ—Г—Б–Ї –њ–Њ–і–њ—А–Њ–≥—А–∞–Љ–Љ—ЛвА¶вА¶вА¶ 6.6.1 –†—Г—З–љ–Њ–є –≤–≤–Њ–і –њ—А–Њ–≥—А–∞–Љ–Љ—ЛвА¶вА¶вА¶ 6.6.2 –Я–µ—А–µ–і –Ј–∞–њ—Г—Б–Ї–Њ–Љ –њ–Њ–і–њ—А–Њ–≥—А–∞–Љ–Љ—Л 6.6.3 –Ч–∞–њ—Г—Б–Ї –≤–∞—И–µ–є –њ—А–Њ–≥—А–∞–Љ–Љ—Л 6.7 –°–Њ–Ј–і–∞–љ–Є–µ G-–Ї–Њ–і–∞ —Б –њ–Њ–Љ–Њ—Й—М—О –Є–Љ–њ–Њ—А—В–∞ –і—А—Г–≥–Є—Е —Д–∞–є–ї–Њ–≤ 7. –Ъ–Њ–Њ—А–і–Є–љ–∞—В–љ–∞—П —Б–Є—Б—В–µ–Љ–∞, —А–∞–±–Њ—З–∞—П –Њ–±–ї–∞—Б—В—М –Є fixturesвА¶вА¶вА¶вА¶вА¶вА¶ 7.1 –Ъ–Њ–Њ—А–і–Є–љ–∞—В–љ–∞—П —Б–Є—Б—В–µ–Љ–∞ —Б—В–∞–љ–Ї–∞ 7.2 –†–∞–±–Њ—З–Є–µ –Њ—В—Б—В—Г–њ—Л 7.2.1 –£—Б—В–∞–љ–Њ–≤–Ї–∞ –љ–∞—З–∞–ї–∞ —А–∞–±–Њ—В—Л —Б –і–∞–љ–љ–Њ–є —В–Њ—З–Ї–Є 7.2.2 –Я—А–∞–Ї—В–Є—З–µ—Б–Ї–Њ–µ –љ–∞—З–∞–ї—М–љ–Њ–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –≤ —Б—В–∞–љ–Ї–µ 7.3 –Ъ–∞–Ї –љ–∞—Б—З–µ—В —А–∞–Ј–љ–Њ–є –і–ї–Є–љ—Л –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞? 7.3.1 –Я—А–µ–і—Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ–Љ—Л–µ –Є–љ—Б—В—А—Г–Љ–µ–љ—В—Л 7.3.2 –Э–µ–њ—А–µ–і—Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ–Љ—Л–µ –Є–љ—Б—В—А—Г–Љ–µ–љ—В—Л 7.4 –Ъ–∞–Ї —Е—А–∞–љ—П—В—Б—П –Ј–љ–∞—З–µ–љ–Є—П –Њ—В—Б—В—Г–њ–Њ–≤ 7.5 –†–Є—Б–Њ–≤–∞–љ–Є–µ –Љ–љ–Њ–ґ–µ—Б—В–≤–∞ –Ї–Њ–њ–Є–є - Fixtures 7.6 –Я—А–∞–Ї—В–Є—З–µ—Б–Ї–Њ–µ –Є—Б–њ—Л—В–∞–љ–Є–µ "–Ъ–∞—Б–∞–љ–Є—П" 7.6.1 –Ю–Ї–Њ–љ—З–∞–љ–Є–µ —Д—А–µ–Ј–µ—А–Њ–≤–Ї–Є 7.6.2 –Э–∞—Е–Њ–ґ–і–µ–љ–Є–µ —Г–≥–ї–Њ–≤ 7.7 –Ю—В—Б—В—Г–њ—Л G52 & G92 7.7.1 –Ш—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ G52 7.7.2 –Ш—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ G92 7.7.3 –Я—А–µ–і–Њ—Б—В–Њ—А–Њ–ґ–љ–Њ—Б—В–Є –њ—А–Є –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–Є G52 –Є G92 7.8 –Ф–Є–∞–Љ–µ—В—А –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ 8. –Ш–Љ–њ–Њ—А—В DXF, HPGL–Є —Д–∞–є–ї–Њ–≤ –Є–Ј–Њ–±—А–∞–ґ–µ–љ–Є–євА¶вА¶вА¶вА¶вА¶ 8.1 –Т—Б—В—Г–њ–ї–µ–љ–Є–µ 8.2 –Ш–Љ–њ–Њ—А—В DXF 8.2.1 –Ч–∞–≥—А—Г–Ј–Ї–∞ —Д–∞–є–ї–∞ 8.2.2 –Ю–њ—А–µ–і–µ–ї–µ–љ–Є–µ –і–µ–є—Б—В–≤–Є–є –і–ї—П —Б–ї–Њ–µ–≤ 8.2.3 –Э–∞—Б—В—А–Њ–є–Ї–Є –Ї–Њ–љ–≤–µ—А—В–Є—А–Њ–≤–∞–љ–Є—П 8.2.4 –У–µ–љ–µ—А–∞—Ж–Є—П G-–Ї–Њ–і–∞вА¶ 8.3 –Ш–Љ–њ–Њ—А—В HPGL 8.3.1 –Ю–њ–Є—Б–∞–љ–Є–µ HPGL 8.3.2 –Т—Л–±–Њ—А —Д–∞–є–ї–∞ –і–ї—П –Є–Љ–њ–Њ—А—В–∞ 8.3.3 –Э–∞—Б—В—А–Њ–є–Ї–Є –Є–Љ–њ–Њ—А—В–∞ 8.3.4 –Ч–∞–њ–Є—Б—М —Д–∞–є–ї–∞ G-–Ї–Њ–і–∞ 8.4 –Ш–Љ–њ–Њ—А—В —В–Њ—З–µ—З–љ—Л—Е —А–Є—Б—Г–љ–Ї–Њ–≤ (BMP –Є JPEG) 8.4.1 –Т—Л–±–Њ—А —Д–∞–є–ї–∞ –і–ї—П –Є–Љ–њ–Њ—А—В–∞ 8.4.2 –Т—Л–±–Њ—А –Љ–µ—В–Њ–і–∞ —А–µ–љ–і–µ—А–Є–љ–≥–∞ 8.4.3 –†–∞—Б—В—А–Њ–≤—Л–є –Є —Б–њ–Є—А–∞–ї—М–љ—Л–є —А–µ–љ–і–µ—А–Є–љ–≥ 8.4.4 –†–µ–љ–і–µ—А–Є–љ–≥ –і–Є—Д—Д—Г–Ј–Є–Є —В–Њ—З–µ–Ї 8.4.5 –Ч–∞–њ–Є—Б—М —Д–∞–є–ї–∞ G-–Ї–Њ–і–∞ 9. –Ъ–Њ–Љ–њ–µ–љ—Б–∞—Ж–Є—П —А–µ–Ј–∞–Ї–∞вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶ 9.1 –Т–≤–µ–і–µ–љ–Є–µ –≤ –Ї–Њ–Љ–њ–µ–љ—Б–∞—Ж–Є—ОвА¶вА¶ 9.2 –Ф–≤–∞ –≤–Є–і–∞ –Ї–Њ–љ—В—Г—А–∞вА¶вА¶. 9.2.1 –Ъ–Њ–љ—В—Г—А –Ї—А–∞–µ–≤ –Љ–∞—В–µ—А–Є–∞–ї–∞ 9.2.2 –Ъ–Њ–љ—В—Г—А –њ—Г—В–Є –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ 9.2.3 Programming Entry Moves 10. –Ч–љ–∞–Ї–Њ–Љ—Б—В–≤–Њ —Б —П–Ј—Л–Ї–Њ–Љ G- –Є M-–Ї–Њ–і–Њ–≤ Mach3 10.1 –Э–µ–Ї–Њ—В–Њ—А—Л–µ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П 10.1.1 –Ы–Є–љ–µ–є–љ—Л–µ –Њ—Б–Є 10.1.2 –Ю—Б–Є –≤—А–∞—Й–µ–љ–Є—П 10.1.3 –Т–≤–Њ–і —И–Ї–∞–ї—Л 10.1.4 –£–њ—А–∞–≤–ї—П–µ–Љ–∞—П —В–Њ—З–Ї–∞ 10.1.5 –Ы–Є–љ–µ–є–љ–Њ–µ –і–≤–Є–ґ–µ–љ–Є–µ –њ–Њ –Ї–Њ–Њ—А–і–Є–љ–∞—В–∞–Љ 10.1.6 –£—А–Њ–≤–µ–љ—М –њ–Њ–і–∞—З–Є 10.1.7 –Ф–≤–Є–ґ–µ–љ–Є–µ —П–Ї–Њ—А—П 10.1.8 –Ю—Е–ї–∞–ґ–і–µ–љ–Є–µ 10.1.9 Dwell (–Ч–∞–і–µ—А–ґ–Ї–∞) 10.1.10 –Х–і–Є–љ–Є—Ж—Л 10.1.11 –Ґ–µ–Ї—Г—Й–µ–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ 10.1.12 –Т—Л–±—А–∞–љ–љ–Њ–µ Plane 10.1.13 –†–∞–±–Њ—З–∞—П –Њ–±–ї–∞—Б—В—М 10.1.14 –°–Љ–µ–љ–∞ –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ 10.1.15 Pallet Shuttle 10.1.16 –†–µ–ґ–Є–Љ—Л —Г–њ—А–∞–≤–ї–µ–љ–Є—П –њ—Г—В–µ–Љ 10.2 –Т–Ј–∞–Є–Љ–Њ–і–µ–є—Б—В–≤–Є–µ –Є–љ—В–µ—А–њ—А–µ—В–∞—В–Њ—А–∞ —Б —Г–њ—А–∞–≤–ї–µ–љ–Є–µ–Љ 10.2.1 –£–њ—А–∞–≤–ї–µ–љ–Є–µ –Њ–±—Е–Њ–і–Њ–Љ –њ–Њ–і–∞—З–Є –Є —Б–Ї–Њ—А–Њ—Б—В–Є 10.2.2 –£–њ—А–∞–≤–ї–µ–љ–Є–µ —Г–і–∞–ї–µ–љ–Є–µ–Љ –±–ї–Њ–Ї–∞ 10.2.3 –£–њ—А–∞–≤–ї–µ–љ–Є–µ –≤—Л–±–Њ—А–Њ—З–љ–Њ–є –Њ—Б—В–∞–љ–Њ–≤–Ї–Њ–є –њ—А–Њ–≥—А–∞–Љ–Љ—Л 10.3 –§–∞–є–ї –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ 10.4 –ѓ–Ј—Л–Ї –њ–Њ–і–њ—А–Њ–≥—А–∞–Љ–ЉвА¶вА¶вА¶вА¶вА¶. 10.4.1 –Ю–±–Ј–Њ—АвА¶ 10.4.2 –Я–∞—А–∞–Љ–µ—В—А—Л 10.4.3 –°–Є—Б—В–µ–Љ–∞ –Ї–Њ–Њ—А–і–Є–љ–∞—В 10.5 –§–Њ—А–Љ–∞—В —Б—В—А–Њ–Ї–ЄвА¶ 10.5.1 –Э–Њ–Љ–µ—А —Б—В—А–Њ–Ї–Є 10.5.2 Subroutine —П—А–ї—Л–Ї–Є 10.5.3 –°–ї–Њ–≤–Њ 10.5.3.1 –Э–Њ–Љ–µ—АвА¶вА¶ 10.5.3.2 –Ч–љ–∞—З–µ–љ–Є–µ –њ–∞—А–∞–Љ–µ—В—А–∞ 10.5.3.3 –Т—Л—А–∞–ґ–µ–љ–Є—П –Є –і–≤–Њ–Є—З–љ—Л–µ –Њ–њ–µ—А–∞—Ж–Є–ЄвА¶ 10.5.3.4 –Ч–љ–∞—З–µ–љ–Є—П –Њ–і–Є–љ–∞—А–љ—Л—Е –Њ–њ–µ—А–∞—Ж–Є–є 10.5.4 –Ч–∞–і–∞–љ–Є–µ –њ–∞—А–∞–Љ–µ—В—А–∞ 10.5.5 –Ъ–Њ–Љ–Љ–µ–љ—В–∞—А–Є–Є –Є —Б–Њ–Њ–±—Й–µ–љ–Є—П 10.5.6 –Я–Њ–≤—В–Њ—А –њ—А–µ–і–Љ–µ—В–∞ 10.5.7 –Я–Њ—А—П–і–Њ–Ї –њ—А–µ–і–Љ–µ—В–Њ–≤ 10.5.8 –Ъ–Њ–Љ–∞–љ–і—Л –Є —А–µ–ґ–Є–Љ—Л —Б—В–∞–љ–Ї–∞вА¶ 10.6 –Ь–Њ–і–∞–ї—М–љ—Л–µ –≥—А—Г–њ–њ—Л 10.7 G-–Ї–Њ–і—ЛвА¶ 10.7.1 –£—Б–Ї–Њ—А–µ–љ–љ–Њ–µ –ї–Є–љ–µ–є–љ–Њ–µ –і–≤–Є–ґ–µ–љ–Є–µ - G0 10.7.2 –Ы–Є–љ–µ–є–љ–Њ–µ –і–≤–Є–ґ–µ–љ–Є–µ –љ–∞ —Г—А–Њ–≤–љ–µ –њ–Њ–і–∞—З–Є - G1 10.7.3 –ѓ–Ї–Њ—А—М –љ–∞ —Г—А–Њ–≤–љ–µ –њ–Њ–і–∞—З–Є - G2 and G3 вА¶ 10.7.3.1 –ѓ–Ї–Њ—А—М –≤–Є–і–∞ —А–∞–і–Є—Г—Б 10.7.3.2 –ѓ–Ї–Њ—А—М –≤–Є–і–∞ —Ж–µ–љ—В—АвА¶вА¶ 10.7.4 Dwell (–Ф—А–µ–ї—М) - G4 10.7.5 –Ч–∞–і–∞–љ–Є–µ –і–∞–љ–љ—Л—Е –Ї–Њ–Њ—А–і–Є–љ–∞—В–љ–Њ–є —Б–Є—Б—В–µ–Љ—Л –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ –Є —В–∞–±–ї–Є—Ж —А–∞–±–Њ—З–Є—Е –Њ—В—Б—В—Г–њ–Њ–≤ - G10вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶ 10.7.6 Clockwise/counterclockwise circular pocket - G12 and G13 10.7.7 –Т—Л—Е–Њ–і –Є –≤—Е–Њ–і –≤ –њ–Њ–ї—П—А–љ—Л–є —А–µ–ґ–Є–Љ - G15 –Є G16 10.7.8 –Т—Л–±–Њ—А Plane - G17, G18, –Є G19 вА¶ 10.7.9 –Х–і–Є–љ–Є—Ж—Л –і–ї–Є–љ–љ—Л - G20 –Є G21 10.7.10 –Т–Њ–Ј–≤—А–∞—В –љ–∞ –Є—Б—Е–Њ–і–љ—Г—О –њ–Њ–Ј–Є—Ж–Є—О - G28 –Є G30 10.7.11 –°–Њ–Њ—В–љ–Њ—И–µ–љ–Є–µ –Њ—Б–µ–є G28.1 10.7.12 Straight Probe вАУ G31 10.7.12.1 The Straight Probe Command 10.7.12.2 Using the Straight Probe Command 10.7.12.3 –Я—А–Є–Љ–µ—А –Ї–Њ–і–∞вА¶ 10.7.13 –Ъ–Њ–Љ–њ–µ–љ—Б–∞—Ж–Є—П —А–∞–і–Є—Г—Б–∞ —А–µ–Ј–∞–Ї–∞ - G40, G41, –Є G42 10.7.14 –Ю—В—Б—В—Г–њ—Л –і–ї–Є–љ—Л –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ - G43, G44 –Є G49 10.7.15 Scale factors G50 and G51 10.7.16 –Т—А–µ–Љ–µ–љ–љ—Л–є –Њ—В—Б—В—Г–њ –Ї–Њ–Њ—А–і–Є–љ–∞—В–љ–Њ–є —Б–Є—Б—В–µ–Љ—Л вАУ G52 10.7.17 –Ф–≤–Є–ґ–µ–љ–Є–µ –њ–Њ –∞–±—Б–Њ–ї—О—В–љ—Л–Љ –Ї–Њ–Њ—А–і–Є–љ–∞—В–∞–Љ - G53 10.7.18 –Т—Л–±–Њ—А —А–∞–±–Њ—З–µ–≥–Њ –Њ—В—Б—В—Г–њ–∞ –Ї–Њ–Њ—А–і–Є–љ–∞—В–љ–Њ–є —Б–Є—Б—В–µ–Љ—Л - G54 –і–Њ G59 –Є G59 P~ 10.7.19 –Ч–∞–і–∞–љ–Є–µ —А–µ–ґ–Є–Љ–∞ –Ї–Њ–љ—В—А–Њ–ї—П –њ—Г—В–Є - G61, –Є G64 10.7.20 –Т—А–∞—Й–µ–љ–Є–µ –Ї–Њ–Њ—А–і–Є–љ–∞—В–љ–Њ–є —Б–Є—Б—В–µ–Љ—Л вАУ G68 –Є G69 10.7.21 –Х–і–Є–љ–Є—Ж—Л –і–ї–Є–љ—Л вАУ G70 –Є G71 10.7.22 Canned Cycle вАУ High Speed Peck Drill G73 10.7.23 –Ю—В–Љ–µ–љ–∞ –Љ–Њ–і–∞–ї—М–љ–Њ–≥–Њ –і–≤–Є–ґ–µ–љ–Є—ПвА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶ 10.7.24 Canned Cycles - G81 to G89 10.7.24.1 Preliminary and In-Between Motion 10.7.24.2 G81 –¶–Є–Ї–ї 10.7.24.3 G82 –¶–Є–Ї–ї 10.7.24.4 G83 –¶–Є–Ї–ї 10.7.24.5 G84 –¶–Є–Ї–ї 10.7.24.6 G85 –¶–Є–Ї–ї 10.7.24.7 G86 –¶–Є–Ї–ї 10.7.24.8 G87 –¶–Є–Ї–ї 10.7.24.9 G88 –¶–Є–Ї–ї 10.7.24.10 G89 –¶–Є–Ї–ї 10.7.25 –Ч–∞–і–∞–љ–Є–µ —А–µ–ґ–Є–Љ–∞ —А–∞—Б—Б—В–Њ—П–љ–Є—П - G90 –Є G91 10.7.26 –Ч–∞–і–∞–љ–Є–µ —А–µ–ґ–Є–Љ–∞ IJ - G90.1 –Є G91.1 10.7.27 –Ю—В—Б—В—Г–њ—Л G92 - G92, G92.1, G92.2, G92.3 10.7.28 –Ч–∞–і–∞—В—М —А–µ–ґ–Є–Љ —Г—А–Њ–≤–љ—П –њ–Њ–і–∞—З–Є - G93, G94 –Є G95 10.7.29 –Ч–∞–і–∞—В—М —Г—А–Њ–≤–µ–љ—М –≤–Њ–Ј–≤—А–∞—В–∞ Canned Cycle - G98 –Є G99 10.8 –Т—Б—В—А–Њ–µ–љ–љ—Л–µ M –Ї–Њ–і—Л 10.8.1 –Ю—Б—В–∞–љ–Њ–≤–Ї–∞ –Є –Ј–∞–≤–µ—А—И–µ–љ–Є–µ –њ—А–Њ–≥—А–∞–Љ–Љ—Л - M0, M1, M2, M30 10.8.2 –£–њ—А–∞–≤–ї–µ–љ–Є–µ —И–њ–Є–љ–і–µ–ї–µ–Љ - M3, M4, M5 10.8.3 –°–Љ–µ–љ–∞ –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ - M6 10.8.4 –£–њ—А–∞–≤–ї–µ–љ–Є–µ –Њ—Е–ї–∞–ґ–і–µ–љ–Є–µ–Љ - M7, M8, M9 10.8.5 –Я–µ—А–µ–Ј–∞–њ—Г—Б–Ї —Б –њ–µ—А–≤–Њ–є —Б—В—А–Њ–Ї–Є - M47 10.8.6 –£–њ—А–∞–≤–ї–µ–љ–Є–µ –Њ–±—Е–Њ–і–Њ–Љ - M48 –Є M49 10.8.7 –Т—Л–Ј–Њ–≤ —Б—Г–±—А—Г—В–Є–љ—Л - M98 10.8.8 –Т–Њ–Ј–≤—А–∞—В –Є–Ј —Б—Г–±—А—Г—В–Є–љ—Л 10.9 –Ь–∞–Ї—А–Њ—Б—Л M-–Ї–Њ–і–Њ–≤ 10.9.1 –Ю–±–Ј–Њ—А –Љ–∞–Ї—А–Њ—Б–Њ–≤ 10.10 –Ф—А—Г–≥–Є–µ –Ї–Њ–і—Л –≤–≤–Њ–і–∞ 10.10.1 –Ч–∞–і–∞–љ–Є–µ —Г—А–Њ–≤–љ—П –њ–Њ–і–∞—З–Є - F 10.10.2 –Ч–∞–і–∞–љ–Є–µ —Б–Ї–Њ—А–Њ—Б—В–Є —И–њ–Є–љ–і–µ–ї—П - S 10.10.3 –Т—Л–±–Њ—А –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ вАУ T 10.11 –Ь–µ—В–Њ–і—Л –±–Њ—А—М–±—Л —Б –Њ—И–Є–±–Ї–∞–Љ–Є 10.12 –Я–Њ—А—П–і–Њ–Ї –≤—Л–њ–Њ–ї–љ–µ–љ–Є—П 11. –Я—А–Є–ї–Њ–ґ–µ–љ–Є–µ 1 вАУ –°–Ї—А–Є–љ—И–Њ—В—Л Mach3 12. –Я—А–Є–ї–Њ–ґ–µ–љ–Є–µ 2 вАУ –Я—А–Є–Љ–µ—А—Л –і–Є–∞–≥—А–∞–Љ–Љ 12.1 –†–µ–ї–µ –Њ–≥—А–∞–љ–Є—З–µ–љ–Є–є –Є EStop –Ъ—Б—В–∞—В–Є, –њ—А–Є –Њ—Д–Њ—А–Љ–ї–µ–љ–Є–Є —З–µ—А—В–µ–ґ–∞ –ї—Г—З—И–µ –≤—Б–µ–≥–Њ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М –љ–Њ—А–Љ–∞—В–Є–≤–љ—Г—О –і–Њ–Ї—Г–Љ–µ–љ—В–∞—Ж–Є—О. ¬†
|
–У—А—Г–њ–њ–∞ VK
–Э–Њ–≤—Л–µ —Б—В–∞—В—М–Є
- –Ш–Ј–≥–Њ—В–Њ–≤–ї–µ–љ–Є–µ –І–Я–£ —Б—В–∞–љ–Ї–∞ –Є–Ј —Д–∞–љ–µ—А—Л —Б–≤–Њ–Є–Љ–Є —А—Г–Ї–∞–Љ–Є
- –°–∞–Љ–Њ–і–µ–ї—М–љ—Л–є –ї–∞–Ј–µ—А –љ–∞ CO2
- –Ъ–∞–Ї —А–∞–Ј—А–∞–±–Њ—В–∞—В—М, —Б–Њ–±—А–∞—В—М –Є –Ј–∞–њ—Г—Б—В–Є—В—М –І–Я–£ —Б—В–∞–љ–Њ–Ї
- –І–Я–£ —Д—А–µ–Ј–µ—А –Є–Ј —Д–∞–љ–µ—А—Л —Б–≤–Њ–Є–Љ–Є —А—Г–Ї–∞–Љ–Є
- –°–∞–Љ–Њ–і–µ–ї—М–љ—Л–є –ї–∞–Ј–µ—А–љ—Л–є SCARA —А–Њ–±–Њ—В-–≥—А–∞–≤–µ—А